Title: Motion rig project
Post by: Chris_Beeves on September 01, 2021, 06:42:44 PM
Post by: Chris_Beeves on September 01, 2021, 06:42:44 PM
Hey guys!
This is a project I started a few days ago. I mean to have it finished before summer 2022.
I love how it lands the wheelie at 0:18 ;D
Like someone said on Discord, I really need a little action figure on there!
The Simtools plugin for GPbikes is outdated unfortunately, so for the moment I am stuck with mgp18..
I have started looking into rewriting the plugin for UDP instead, should solve the 64-32-bit problem.
This is a project I started a few days ago. I mean to have it finished before summer 2022.
I love how it lands the wheelie at 0:18 ;D
Like someone said on Discord, I really need a little action figure on there!
The Simtools plugin for GPbikes is outdated unfortunately, so for the moment I am stuck with mgp18..
I have started looking into rewriting the plugin for UDP instead, should solve the 64-32-bit problem.
Title: Re: Motion rig project
Post by: Manu on September 01, 2021, 06:55:51 PM
Post by: Manu on September 01, 2021, 06:55:51 PM
Very interesting. Good job!
Title: Re: Motion rig project
Post by: poumpouny on September 02, 2021, 08:08:10 AM
Post by: poumpouny on September 02, 2021, 08:08:10 AM
Wow. I have also a project but 2dof only. Good job !
Title: Re: Motion rig project
Post by: Chris_Beeves on September 02, 2021, 08:30:00 AM
Post by: Chris_Beeves on September 02, 2021, 08:30:00 AM
Quote from: poumpouny on September 02, 2021, 08:08:10 AMWow. I have also a project but 2dof only. Good job !Cool! How's it going?
Are you running it straight from gpb export or with something like simtools in between?
Title: Re: Motion rig project
Post by: poumpouny on September 03, 2021, 06:42:30 AM
Post by: poumpouny on September 03, 2021, 06:42:30 AM
I'm plannig getting data from the same output as Max use for his MAx HUD plugin. It is still in plan phase, nothing really started, but i will also start from scale model like your's
Title: Re: Motion rig project
Post by: davidboda46 on September 03, 2021, 09:24:03 PM
Post by: davidboda46 on September 03, 2021, 09:24:03 PM
Just wanted to say that the stuff you're doing is awesome and it's so much fun watching your projects progress over time.
Cheers,
/David "Gonzo" Boda #46
Cheers,
/David "Gonzo" Boda #46
Title: Re: Motion rig project
Post by: Chris_Beeves on September 04, 2021, 05:47:17 PM
Post by: Chris_Beeves on September 04, 2021, 05:47:17 PM
Thanks David! I appreciate that! :D
Title: Re: Motion rig project
Post by: VSMaster on September 04, 2021, 08:51:22 PM
Post by: VSMaster on September 04, 2021, 08:51:22 PM
I agree. With David. Congratulations to the progress you've made so far.
Title: Re: Motion rig project
Post by: Chris_Beeves on September 05, 2021, 07:03:56 AM
Post by: Chris_Beeves on September 05, 2021, 07:03:56 AM
Thanks VS!
I'll keep you posted with progress.
I'll keep you posted with progress.
Title: Re: Motion rig project
Post by: RobyXit on October 08, 2021, 08:20:15 PM
Post by: RobyXit on October 08, 2021, 08:20:15 PM
Congrats 8)
Title: Re: Motion rig project
Post by: daye on October 31, 2021, 01:43:04 PM
Post by: daye on October 31, 2021, 01:43:04 PM
whaaooooooooooooooo
Title: Re: Motion rig project
Post by: Chad Smith on January 03, 2022, 07:06:34 PM
Post by: Chad Smith on January 03, 2022, 07:06:34 PM
That looks really cool. I'll be following this and might take some idea from you for my motion ;D
What do you think about adding a traction lose?
What do you think about adding a traction lose?
Title: Re: Motion rig project
Post by: Chris_Beeves on January 03, 2022, 09:32:14 PM
Post by: Chris_Beeves on January 03, 2022, 09:32:14 PM
The prototype has traction loss, it's just that motogp18 doesn't output that.
The rig will have 4 dof:
- Pitch
- Roll
- Heave
- Traction loss
Sway can be somewhat simulated, but I'm not sure how useful that effect is.
The motors and electronics just arrived and are waiting for me to pick them up at the post office.
In two weeks the design phase starts, not long now! :D
The rig will have 4 dof:
- Pitch
- Roll
- Heave
- Traction loss
Sway can be somewhat simulated, but I'm not sure how useful that effect is.
The motors and electronics just arrived and are waiting for me to pick them up at the post office.
In two weeks the design phase starts, not long now! :D
Title: Re: Motion rig project
Post by: Chad Smith on January 04, 2022, 01:28:13 AM
Post by: Chad Smith on January 04, 2022, 01:28:13 AM
Nice! Looking forward to it. Do you have an x-sim build thread?
Title: Re: Motion rig project
Post by: Chris_Beeves on January 04, 2022, 06:35:19 AM
Post by: Chris_Beeves on January 04, 2022, 06:35:19 AM
Me too. Have been looking forward to this for a looooong time!
There is a thread at xsim, but not sure where I will focus on updating.. There are many places 😆
There is a thread at xsim, but not sure where I will focus on updating.. There are many places 😆
Title: Re: Motion rig project
Post by: Vini on January 04, 2022, 10:00:25 AM
Post by: Vini on January 04, 2022, 10:00:25 AM
Nice, Chris.
Traction loss is yaw?
Traction loss is yaw?
Title: Re: Motion rig project
Post by: Chris_Beeves on January 04, 2022, 11:06:32 AM
Post by: Chris_Beeves on January 04, 2022, 11:06:32 AM
Thanks Vin!
Not exactly yaw. Rather rotation with center point somewhere around where the front tire contact patch would be.
Front traction loss will have to wait until V2, It's kind of pointless to simulate 99% of the time since it usually can't be saved anyway. The handlebars will have to convey that instead.
Not exactly yaw. Rather rotation with center point somewhere around where the front tire contact patch would be.
Front traction loss will have to wait until V2, It's kind of pointless to simulate 99% of the time since it usually can't be saved anyway. The handlebars will have to convey that instead.
Title: Re: Motion rig project
Post by: Vini on January 04, 2022, 11:40:35 AM
Post by: Vini on January 04, 2022, 11:40:35 AM
I wonder how all this will be perceived by the "popometer".
Title: Re: Motion rig project
Post by: Chris_Beeves on January 04, 2022, 12:14:32 PM
Post by: Chris_Beeves on January 04, 2022, 12:14:32 PM
Not sure it will show on such a device ;D
Title: Re: Motion rig project
Post by: Vini on January 04, 2022, 12:21:03 PM
Post by: Vini on January 04, 2022, 12:21:03 PM
I don't know. If you manage to utilize gravity in the right way, a well timed heigh shift could be sufficient to trigger the tingly feeling that makes you pucker up.
Title: Re: Motion rig project
Post by: Vini on January 04, 2022, 12:27:39 PM
Post by: Vini on January 04, 2022, 12:27:39 PM
Have you thought about some strap support system that helps you stay on the bike as compensation for the lack of cornering forces?
Title: Re: Motion rig project
Post by: Vini on January 04, 2022, 12:36:25 PM
Post by: Vini on January 04, 2022, 12:36:25 PM
What about putting a few electrodes into the seat to give you some small current when the rear is sliding :D :D
Title: Re: Motion rig project
Post by: Chris_Beeves on January 04, 2022, 01:54:40 PM
Post by: Chris_Beeves on January 04, 2022, 01:54:40 PM
There are many things I want to research when it comes to output and input data translating into motion.
Electrodes in my ass is not one of those things!
However, there is a detail in vehicle simulation that gives researchers trouble. That is that there is no real fear of crashing or failing, so the results aren't always relevant to real life.
The groin electrocution would change that.
I'm not 100% sure I understood what the "popometer" is.. :)
Electrodes in my ass is not one of those things!
However, there is a detail in vehicle simulation that gives researchers trouble. That is that there is no real fear of crashing or failing, so the results aren't always relevant to real life.
The groin electrocution would change that.
I'm not 100% sure I understood what the "popometer" is.. :)
Title: Re: Motion rig project
Post by: Vini on January 04, 2022, 03:37:55 PM
Post by: Vini on January 04, 2022, 03:37:55 PM
"Popometer" is an established term in racing german which translates to "ass-meter", or the feeling you get from your ass over what the vehicle is doing. Specifically rear slip and yaw angle.
The electrodes (or metal seat surface) are not supposed to replace the pain of crashing, it's supposed to replicate the tingly feeling you get when your bike starts getting light at the rear. Similar to when you are standing next to a steep cliff etc. you get what I mean.
An alternative would be pressure outputs at different zones, similar to how F1 teams simulate Gforces.
The electrodes (or metal seat surface) are not supposed to replace the pain of crashing, it's supposed to replicate the tingly feeling you get when your bike starts getting light at the rear. Similar to when you are standing next to a steep cliff etc. you get what I mean.
An alternative would be pressure outputs at different zones, similar to how F1 teams simulate Gforces.
Title: Re: Motion rig project
Post by: Chris_Beeves on January 04, 2022, 05:00:07 PM
Post by: Chris_Beeves on January 04, 2022, 05:00:07 PM
There will be shaker speakers in the seat and tank to be able to communicate popo-feelings! Those in combination with rig motion should be enough if triggered correctly.
I wrote some wheel spin code for simhub which seems to work very well.
I wrote some wheel spin code for simhub which seems to work very well.
Title: Re: Motion rig project
Post by: Chris_Beeves on January 12, 2022, 10:21:46 PM
Post by: Chris_Beeves on January 12, 2022, 10:21:46 PM
Monday I finally get to start working on this. Some of the hardware has arrived, so electrically we're pretty set except for cabling.
Title: Re: Motion rig project
Post by: Chad Smith on January 13, 2022, 08:39:47 PM
Post by: Chad Smith on January 13, 2022, 08:39:47 PM
Heck yeah! Looks like a good project.
What motors did you get?
Also, on your scale motors did you print some levers to go on the end of the motor shaft? I can seem to find any levers.
Good luck with the build!
What motors did you get?
Also, on your scale motors did you print some levers to go on the end of the motor shaft? I can seem to find any levers.
Good luck with the build!
Title: Re: Motion rig project
Post by: Chris_Beeves on January 13, 2022, 08:55:15 PM
Post by: Chris_Beeves on January 13, 2022, 08:55:15 PM
440W 60Nm something. It's going to be interesting!
I just used normal servo horns and some rc car spares I had lying around.
I just used normal servo horns and some rc car spares I had lying around.
Title: Re: Motion rig project
Post by: Chris_Beeves on February 09, 2022, 10:01:04 PM
Post by: Chris_Beeves on February 09, 2022, 10:01:04 PM
Lots of CAD work going on. Lots of simulations have to be done in order to make sure the weight is kept as low as possible.
This is one of the early candidates for the upper platform.
You cannot see attachments on this board.
This is one of the early candidates for the upper platform.
You cannot see attachments on this board.
Title: Re: Motion rig project
Post by: Chris_Beeves on February 21, 2022, 08:20:43 PM
Post by: Chris_Beeves on February 21, 2022, 08:20:43 PM
The structure and geometry seems to be taking its final form. Now we are working on the separate components making them manufacturable. Starting to feel the pressure of getting everything ready so we can start assembly in time!
You cannot see attachments on this board.
You cannot see attachments on this board.
Title: Re: Motion rig project
Post by: Vini on February 28, 2022, 08:32:44 PM
Post by: Vini on February 28, 2022, 08:32:44 PM
Nice.
Who is "we" btw? Thought this was going to be your thesis.
Who is "we" btw? Thought this was going to be your thesis.
Title: Re: Motion rig project
Post by: Chris_Beeves on February 28, 2022, 09:00:05 PM
Post by: Chris_Beeves on February 28, 2022, 09:00:05 PM
It is my thesis, me and a friend are doing it together. I'm glad I didn't try to do all this alone.
Title: Re: Motion rig project
Post by: Chris_Beeves on March 02, 2022, 11:20:54 AM
Post by: Chris_Beeves on March 02, 2022, 11:20:54 AM
Today I ordered 40kgs of aluminium extrusion profiles!
At least some of the assembly will be able to start soon! :D
At least some of the assembly will be able to start soon! :D
Title: Re: Motion rig project
Post by: Chris_Beeves on March 23, 2022, 07:45:35 PM
Post by: Chris_Beeves on March 23, 2022, 07:45:35 PM
Schematics for almost all parts are nearly finished, so all the parts from external fabricators will soon be ordered!
The technical documentation took way longer than I expected..
The technical documentation took way longer than I expected..
Title: Re: Motion rig project
Post by: Chris_Beeves on March 24, 2022, 09:25:18 PM
Post by: Chris_Beeves on March 24, 2022, 09:25:18 PM
Had to do something mechanical after all this cad and fem work so we assembled the base. Feels good to start putting things together!
You cannot see attachments on this board.
You cannot see attachments on this board.
Title: Re: Motion rig project
Post by: Chris_Beeves on April 22, 2022, 04:40:02 PM
Post by: Chris_Beeves on April 22, 2022, 04:40:02 PM
Things are starting to arrive from manufacturers, some delay on the cnc work though unfortunately..
You cannot see attachments on this board.
You cannot see attachments on this board.
Title: Re: Motion rig project
Post by: Chris_Beeves on April 25, 2022, 09:25:18 PM
Post by: Chris_Beeves on April 25, 2022, 09:25:18 PM
Getting the electrical system ready to test! :D
You cannot see attachments on this board.
You cannot see attachments on this board.
Title: Re: Motion rig project
Post by: doubledragoncc on April 26, 2022, 01:56:59 PM
Post by: doubledragoncc on April 26, 2022, 01:56:59 PM
Looking great Chris. Cant wait to see the end product and you riding it m8
DD
DD
Title: Re: Motion rig project
Post by: Chris_Beeves on April 26, 2022, 08:39:39 PM
Post by: Chris_Beeves on April 26, 2022, 08:39:39 PM
Thanks DD!
Big milestone today, got first motion! It's alive!
Big milestone today, got first motion! It's alive!
Title: Re: Motion rig project
Post by: onearmedbandit on April 26, 2022, 11:43:12 PM
Post by: onearmedbandit on April 26, 2022, 11:43:12 PM
Brilliant, looking forward to seeing it alive in video!
Title: Re: Motion rig project
Post by: Chris_Beeves on April 29, 2022, 08:21:08 PM
Post by: Chris_Beeves on April 29, 2022, 08:21:08 PM
Not a full rig video, but the base platform moving with GPbikes!
Driving with keyboard was impossible! :)
Driving with keyboard was impossible! :)
Title: Re: Motion rig project
Post by: doubledragoncc on April 30, 2022, 05:42:05 PM
Post by: doubledragoncc on April 30, 2022, 05:42:05 PM
And so the restless nights begin..........how to build it and not just look and test it yesterday.
Looking good and look forward to the end result.
DD
Looking good and look forward to the end result.
DD
Title: Re: Motion rig project
Post by: Chris_Beeves on April 30, 2022, 06:25:44 PM
Post by: Chris_Beeves on April 30, 2022, 06:25:44 PM
Haha, yeah.. There have been a few nights where the brain just wont stop.
Thanks, me too! ;D
Just ordered some 2020 R1 race fairings the other day. They looked like the most suiting for fitting on our extrusion profile type rig. Do you use a lot of brackets in order to get your fairings solid, or what is your approach DD?
Thanks, me too! ;D
Just ordered some 2020 R1 race fairings the other day. They looked like the most suiting for fitting on our extrusion profile type rig. Do you use a lot of brackets in order to get your fairings solid, or what is your approach DD?
Title: Re: Motion rig project
Post by: Chris_Beeves on May 02, 2022, 10:47:27 PM
Post by: Chris_Beeves on May 02, 2022, 10:47:27 PM
Had some time in the workshop tonight, now only some bearings are keeping us from assembly of the upper platform.
You cannot see attachments on this board.
You cannot see attachments on this board.
Title: Re: Motion rig project
Post by: teeds on May 05, 2022, 11:31:42 AM
Post by: teeds on May 05, 2022, 11:31:42 AM
No idea which bit that is, but it looks well built.
Title: Re: Motion rig project
Post by: Chris_Beeves on May 05, 2022, 03:15:56 PM
Post by: Chris_Beeves on May 05, 2022, 03:15:56 PM
Thanks Teeds!
Yeah, none of the parts are very obvious really..
Yeah, none of the parts are very obvious really..
Title: Re: Motion rig project
Post by: doubledragoncc on May 07, 2022, 09:41:19 AM
Post by: doubledragoncc on May 07, 2022, 09:41:19 AM
Quote from: Chris_Beeves on April 30, 2022, 06:25:44 PMHaha, yeah.. There have been a few nights where the brain just wont stop.
Thanks, me too! ;D
Just ordered some 2020 R1 race fairings the other day. They looked like the most suiting for fitting on our extrusion profile type rig. Do you use a lot of brackets in order to get your fairings solid, or what is your approach DD?
I use a universal mount system for my frames that is simple but strong and is good for full fairing on Honda CBR1000RR, BMW S1000RR, Yamaha YZR1/M and Ducati 1199, but adaptable for most. I only have static for now so lower rear fairing mounts are adjustable and not so stable but easy to make solid. Front top mount adjustable but solid and on its own supports the whole fairing. Will have to take pics but having problems posting pics on the forum and nobody helped me yet.
I have a few videos of the S1000RR assembly that will show them all.
If you know a simple way to get pics on the forum would help. The links from my mega and mediafire stopped working for some reason.
DD
Title: Re: Motion rig project
Post by: Chris_Beeves on May 07, 2022, 10:14:25 AM
Post by: Chris_Beeves on May 07, 2022, 10:14:25 AM
I'll look it through thanks!
I usually just press ctrl+v when writing text I think.. never had much issues
I usually just press ctrl+v when writing text I think.. never had much issues
Title: Re: Motion rig project
Post by: Hawk on May 07, 2022, 11:25:17 AM
Post by: Hawk on May 07, 2022, 11:25:17 AM
DD.... I've always found https://www.flickr.com/ (https://www.flickr.com/) to be easy and user friendly in being able to upload and share pictures to forums and blogs mate.... They have a free account you can use too, similar to the way MEGA have a free account..... take a look and see what you think. ;)
Title: Re: Motion rig project
Post by: doubledragoncc on May 08, 2022, 08:32:02 AM
Post by: doubledragoncc on May 08, 2022, 08:32:02 AM
Thanks Hawky will look at it
DD
DD
Title: Re: Motion rig project
Post by: doubledragoncc on May 08, 2022, 12:05:22 PM
Post by: doubledragoncc on May 08, 2022, 12:05:22 PM
So I was watching a video from Mysticprun and he uses postimage and it seems real easy so gave it a try. Will try Hawky's idea too but just wanted to post these for Chris.
These are on my CBR1000RR 2005, but same principle can be done for any fairing and lower mount can be made in one part for added strength. Thats 3 mounting parts and stable. The top mount can be adjusted for forward/backward movement and up and down.
 (https://postimg.cc/HV1SYY4k)
(https://postimg.cc/HV1SYY4k)
 (https://postimg.cc/HJnzZVHB)
(https://postimg.cc/HJnzZVHB)
 (https://postimg.cc/BPTBLFcQ)
(https://postimg.cc/BPTBLFcQ)
 (https://postimg.cc/G47JydYY)
(https://postimg.cc/G47JydYY)
 (https://postimg.cc/qNR20SY7)
(https://postimg.cc/qNR20SY7)
Hope that helps.
DD
These are on my CBR1000RR 2005, but same principle can be done for any fairing and lower mount can be made in one part for added strength. Thats 3 mounting parts and stable. The top mount can be adjusted for forward/backward movement and up and down.
(https://postimg.cc/HV1SYY4k) (https://postimg.cc/HJnzZVHB) (https://postimg.cc/BPTBLFcQ) (https://postimg.cc/G47JydYY) (https://postimg.cc/qNR20SY7)Hope that helps.
DD
Title: Re: Motion rig project
Post by: Chris_Beeves on May 10, 2022, 08:40:46 PM
Post by: Chris_Beeves on May 10, 2022, 08:40:46 PM
That looks great DD, thanks for posting! I like the adjustability and simplicity, neat solution!
Title: Re: Motion rig project
Post by: Chris_Beeves on May 12, 2022, 08:49:36 PM
Post by: Chris_Beeves on May 12, 2022, 08:49:36 PM
I had the first proper test drive today, sitting on the rig.
For now just using flat screen and gamepad, but still a great feeling!
You cannot see attachments on this board.
Got the rev lights running too! :D
For now just using flat screen and gamepad, but still a great feeling!
You cannot see attachments on this board.
Got the rev lights running too! :D
Title: Re: Motion rig project
Post by: doubledragoncc on May 13, 2022, 10:37:40 AM
Post by: doubledragoncc on May 13, 2022, 10:37:40 AM
Congrats dude....
On a quick side note.......is it me or is this forum now 99% SPAM and 1% actual posts as when I come on it I see 30 plus spam posts in off topic andd other threads and practically no other posts but yours and a few others, not seen piboso post in ages???
Look at ALL othe piboso games and there are NO spams!!! So why GPB and why wont piboso fix it. Even WRS on same server NO spam!!!
Sorry to highjack the thread to ask but nobody seems to reply..........OR has my account been hacked so its all I see lol
Thanks for the great thread Chris and looking forward to some riding videos
DD
On a quick side note.......is it me or is this forum now 99% SPAM and 1% actual posts as when I come on it I see 30 plus spam posts in off topic andd other threads and practically no other posts but yours and a few others, not seen piboso post in ages???
Look at ALL othe piboso games and there are NO spams!!! So why GPB and why wont piboso fix it. Even WRS on same server NO spam!!!
Sorry to highjack the thread to ask but nobody seems to reply..........OR has my account been hacked so its all I see lol
Thanks for the great thread Chris and looking forward to some riding videos
DD
Title: Re: Motion rig project
Post by: Chris_Beeves on May 13, 2022, 01:21:39 PM
Post by: Chris_Beeves on May 13, 2022, 01:21:39 PM
Thanks DD! The fairings seem to be delayed unfortunately, so I'll have to bodge on some of my old bits to get it in proper riding shape.
On the Hijack note, yeah there is a lot of spam but someone is taking it away. I don't visit the other forums so I don't know.
On the Hijack note, yeah there is a lot of spam but someone is taking it away. I don't visit the other forums so I don't know.
Title: Re: Motion rig project
Post by: doubledragoncc on May 13, 2022, 01:27:43 PM
Post by: doubledragoncc on May 13, 2022, 01:27:43 PM
Yeah just came on and 5 spams to your one post lol.
Forum has become a joke in a way and is such a shame.
Lets hope you gat your fairing set soon m8.
DD
Forum has become a joke in a way and is such a shame.
Lets hope you gat your fairing set soon m8.
DD
Title: Re: Motion rig project
Post by: Chris_Beeves on May 28, 2022, 09:01:00 PM
Post by: Chris_Beeves on May 28, 2022, 09:01:00 PM
Quickly sketched up and printed some holders for small exciter speakers. They go on the knees and triggers above certain lean angles.
Also stole the internals of my ffb wheel to donate to the rig until I get some time to get the new motor driver sorted.
You cannot see attachments on this board.
Also stole the internals of my ffb wheel to donate to the rig until I get some time to get the new motor driver sorted.
You cannot see attachments on this board.
Title: Re: Motion rig project
Post by: doubledragoncc on May 29, 2022, 05:24:16 PM
Post by: doubledragoncc on May 29, 2022, 05:24:16 PM
Great work again Chris.
Really looking forward to end pics and videos.
Any luck on the bodywork?
I looked but no joy in contacting them
DD
Really looking forward to end pics and videos.
Any luck on the bodywork?
I looked but no joy in contacting them
DD
Title: Re: Motion rig project
Post by: Chris_Beeves on May 29, 2022, 06:43:24 PM
Post by: Chris_Beeves on May 29, 2022, 06:43:24 PM
Nope not a word. Checking in tomorrow again.
Title: Re: Motion rig project
Post by: Chris_Beeves on May 31, 2022, 06:23:14 AM
Post by: Chris_Beeves on May 31, 2022, 06:23:14 AM
Sounds like they are being sent today. Fingers crossed we get them in reasonable time..
Title: Re: Motion rig project
Post by: doubledragoncc on May 31, 2022, 11:18:45 AM
Post by: doubledragoncc on May 31, 2022, 11:18:45 AM
Fingers crossed for you m8.
Seems its the only thread thats working now lol
DD
Seems its the only thread thats working now lol
DD
Title: Re: Motion rig project
Post by: Chris_Beeves on June 09, 2022, 06:26:58 PM
Post by: Chris_Beeves on June 09, 2022, 06:26:58 PM
Big presentation was today, great success!
And one hour after I got a notification that the fairings were ready to be picked up ;D
And one hour after I got a notification that the fairings were ready to be picked up ;D
Title: Re: Motion rig project
Post by: Chris_Beeves on June 23, 2022, 07:35:08 PM
Post by: Chris_Beeves on June 23, 2022, 07:35:08 PM
I've been painting and cutting and bracketing wildly.
Now it is getting closer!
Fingers crossed for the coming beta fixing the force feedback issues..
Not too soon though, as I ripped out all the electronics again for a version 2 :D
Now it is getting closer!
Fingers crossed for the coming beta fixing the force feedback issues..
Not too soon though, as I ripped out all the electronics again for a version 2 :D
Title: Re: Motion rig project
Post by: doubledragoncc on June 24, 2022, 08:10:06 AM
Post by: doubledragoncc on June 24, 2022, 08:10:06 AM
THAT is brilliant Chris.
Looking foward to videos so best of luck with FFB and electronics
DD
Looking foward to videos so best of luck with FFB and electronics
DD
Title: Re: Motion rig project
Post by: teeds on June 24, 2022, 08:39:53 AM
Post by: teeds on June 24, 2022, 08:39:53 AM
That looks amazing good work, looking forward to seeing it in action.
Title: Re: Motion rig project
Post by: doubledragoncc on June 24, 2022, 08:48:00 AM
Post by: doubledragoncc on June 24, 2022, 08:48:00 AM
TEEDS...........Hi m8 long time no see. Hope your doing good sir.
DD
DD
Title: Re: Motion rig project
Post by: Vini on June 24, 2022, 02:03:10 PM
Post by: Vini on June 24, 2022, 02:03:10 PM
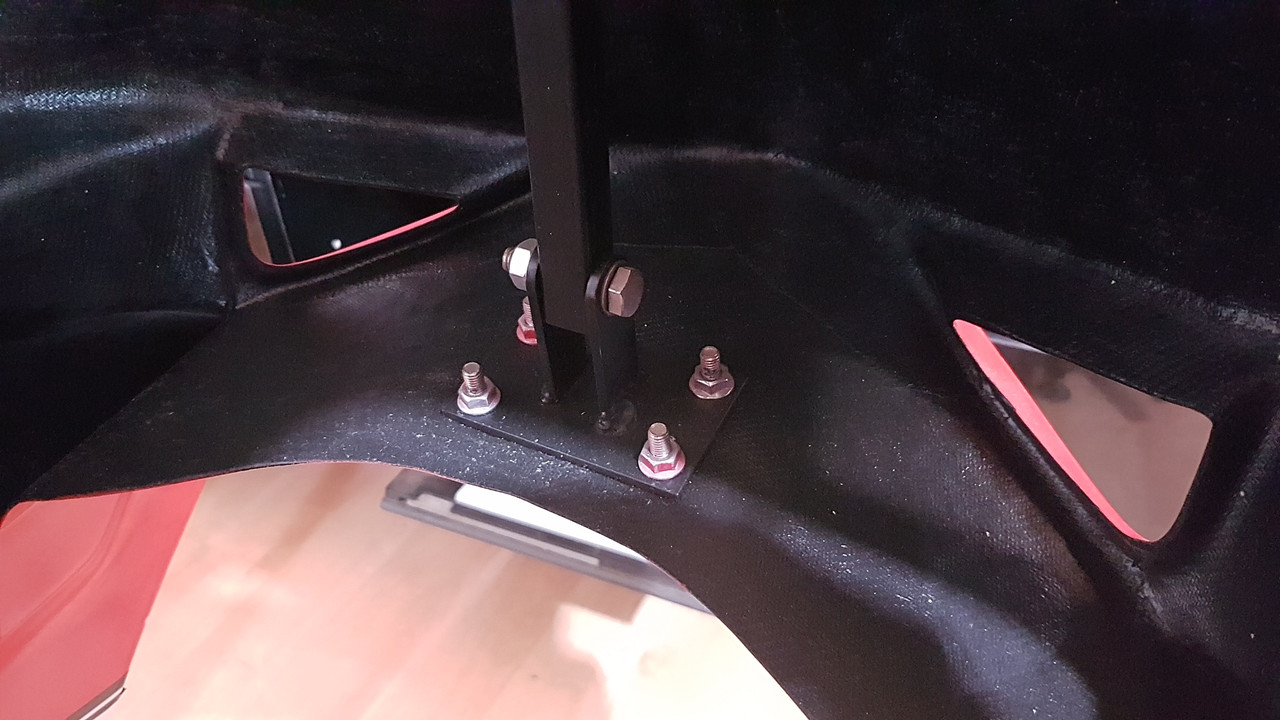
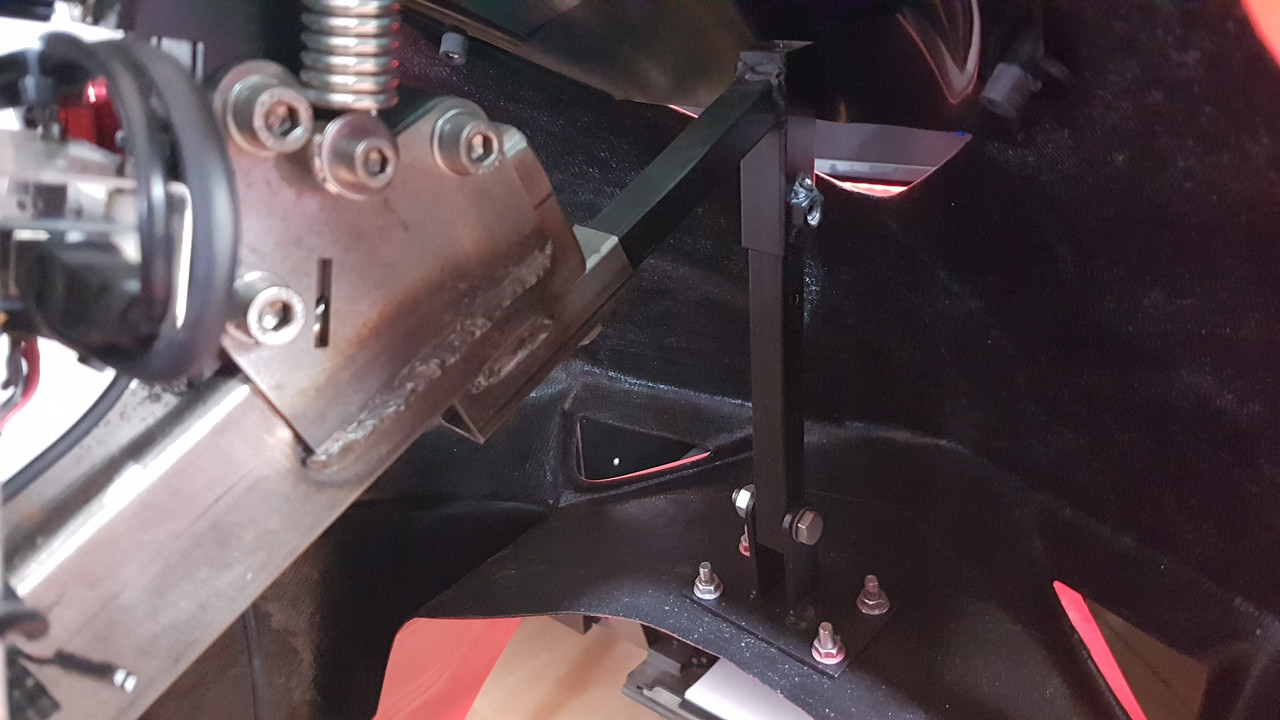
Very clean but the emotor linkages look a bit weak.
Title: Re: Motion rig project
Post by: Chris_Beeves on June 24, 2022, 05:22:35 PM
Post by: Chris_Beeves on June 24, 2022, 05:22:35 PM
Thanks guys ! Hopefully I'll get some good footage at the company reveal in two weeks.
Vini, the eternal optimist ;D
There are 8 10mm 12.9 bolts holding it up. The motor levers are the weakest parts, but they have a safety factor of about three so it should be fine.
Vini, the eternal optimist ;D
There are 8 10mm 12.9 bolts holding it up. The motor levers are the weakest parts, but they have a safety factor of about three so it should be fine.
Title: Re: Motion rig project
Post by: Vini on June 24, 2022, 07:28:07 PM
Post by: Vini on June 24, 2022, 07:28:07 PM
Sorry, couldn't help myself :D Just looked a bit off proportionally.
Anyway, I wish you all the best. Maybe we'll get together again some day.
Anyway, I wish you all the best. Maybe we'll get together again some day.
Title: Re: Motion rig project
Post by: BOBR6 84 on June 24, 2022, 09:42:57 PM
Post by: BOBR6 84 on June 24, 2022, 09:42:57 PM
Looks incredible lol very nice work very professional. Great to see people pushing bike sim rigs... 8)
Title: Re: Motion rig project
Post by: Chris_Beeves on June 25, 2022, 03:32:09 PM
Post by: Chris_Beeves on June 25, 2022, 03:32:09 PM
Thank you Mr. Bob!
Yeah, too little focus on bike sims! People need help identifying their future needs. ;D
Yeah, too little focus on bike sims! People need help identifying their future needs. ;D
Title: Re: Motion rig project
Post by: doubledragoncc on June 25, 2022, 04:15:01 PM
Post by: doubledragoncc on June 25, 2022, 04:15:01 PM
It would help if software houses stopped monopolising the industry with gamepad games ie: Sony Milestone, Kylotonn etc
Thank heavens for Piboso, all hail the king lol
DD
Thank heavens for Piboso, all hail the king lol
DD
Title: Re: Motion rig project
Post by: poumpouny on June 27, 2022, 02:34:40 PM
Post by: poumpouny on June 27, 2022, 02:34:40 PM
Wow man, i'm speechless :o ! you just made what i'm dreaming to do since 7 Years !
Title: Re: Motion rig project
Post by: Chris_Beeves on June 27, 2022, 08:45:16 PM
Post by: Chris_Beeves on June 27, 2022, 08:45:16 PM
Thanks man!
For me too it has been a dream, I feel super lucky to be able to do this as studies. I worked hard for it, but it was sooooo worth it. Already looking into what to do better in version 2 😆
For me too it has been a dream, I feel super lucky to be able to do this as studies. I worked hard for it, but it was sooooo worth it. Already looking into what to do better in version 2 😆
Title: Re: Motion rig project
Post by: Chris_Beeves on June 30, 2022, 08:58:30 AM
Post by: Chris_Beeves on June 30, 2022, 08:58:30 AM
Bought a domino e-throttle and put back the bicycle levers yesterday. They have a more solid feel. So back to wire and normal load cell for the brakes. Also made new circuit boards for the controller mcu and a small one for the rear brake amplifier. Getting close to assemble again.
Can't wait to try the new motion profile! :D
Can't wait to try the new motion profile! :D
Title: Re: Motion rig project
Post by: mdlp on July 01, 2022, 10:54:07 PM
Post by: mdlp on July 01, 2022, 10:54:07 PM
I casually read your comment about the e-throttle, I think how my cheap throttle sometimes has that bit of binding which takes your attention.
Now I'm sitting here shopping for throttles and musing how I could make some linkage for the cable variety. Damn you. ;)
Now I'm sitting here shopping for throttles and musing how I could make some linkage for the cable variety. Damn you. ;)
Title: Re: Motion rig project
Post by: Chris_Beeves on July 02, 2022, 06:53:20 AM
Post by: Chris_Beeves on July 02, 2022, 06:53:20 AM
I just ended up buying a domino throttle real cheap from a friend at RGNT motorcycles. The most difficult part for me was getting a spring that works good and feels right.
Title: Re: Motion rig project
Post by: malcolm_from_nz on July 12, 2022, 12:43:13 AM
Post by: malcolm_from_nz on July 12, 2022, 12:43:13 AM
Chris, have you done anything WRT making the clutch feel right? I've seen a couple of things on here where people have used simple return springs, but clutches don't feel like that, the pressure plate has a tip over point that you can feel.
Title: Re: Motion rig project
Post by: Chris_Beeves on July 12, 2022, 05:40:05 AM
Post by: Chris_Beeves on July 12, 2022, 05:40:05 AM
I tried out all our motorcycles at home and the tipping point was surprisingly absent. The action is not linear though but the difference was not big enough for me to design something to solve it.
I just went with springs. My thought is to put a vibration motor in the handle and simulate bite point that way instead.
I just went with springs. My thought is to put a vibration motor in the handle and simulate bite point that way instead.
Title: Re: Motion rig project
Post by: mdlp on July 12, 2022, 07:36:25 AM
Post by: mdlp on July 12, 2022, 07:36:25 AM
If I had a motion rig (if that's not a phrase that leads to trouble I don't know what is), I'd be tempted to have it a slightly lowered at the front at rest, with the clutch bite point reverting to level to simulate drive take-up.
Which may be ambitious as I don't know what telemetry data is available.
Which may be ambitious as I don't know what telemetry data is available.
Title: Re: Motion rig project
Post by: malcolm_from_nz on July 12, 2022, 11:44:12 PM
Post by: malcolm_from_nz on July 12, 2022, 11:44:12 PM
Definitely more distinct on some than others. CBR1000RR, quite distinct, RGV, reasonably distinct, 748R not much at all, SV1000 not much either. Do you have an email address, I could send you an STL if you like. Cable driven, hall effect sensor.
Next up is the gear shift. All the bikes have that distinct feeling of metal moving and notching into place, I want that. I've been working the various levers with my eyes closed trying to come up with what might replicate that, but no great ideas so far. I know I want a detent to click through, and the other thing is I want the detent tension to be load (engine load) sensitive. I want to be able to preload the lever like I would on a real bike, then back off the gas to let it snick into the next gear, like you would on a bike without a shift lever. Keen to hear any thoughts you might have on that. I think it can be done by the Arduino handling the TPS input, rather than having to receive telemetry via SimHub or whatever.
@mdlp Yes I know what you mean, replicate that 'chonk' as you click into first. The bike itself doesn't move (although I understand why that's probably not a bad way to replicate it, it uses existing mechanics you already paid for!), so I was thinking maybe a servo that lets a weight swing and hit a stop. That will require telemetry though, to know which gear you're in.
I'm quite keen to build a motion rig at some point, but I want to pick off all this low hanging 'immersion' fruit first.
Next up is the gear shift. All the bikes have that distinct feeling of metal moving and notching into place, I want that. I've been working the various levers with my eyes closed trying to come up with what might replicate that, but no great ideas so far. I know I want a detent to click through, and the other thing is I want the detent tension to be load (engine load) sensitive. I want to be able to preload the lever like I would on a real bike, then back off the gas to let it snick into the next gear, like you would on a bike without a shift lever. Keen to hear any thoughts you might have on that. I think it can be done by the Arduino handling the TPS input, rather than having to receive telemetry via SimHub or whatever.
@mdlp Yes I know what you mean, replicate that 'chonk' as you click into first. The bike itself doesn't move (although I understand why that's probably not a bad way to replicate it, it uses existing mechanics you already paid for!), so I was thinking maybe a servo that lets a weight swing and hit a stop. That will require telemetry though, to know which gear you're in.
I'm quite keen to build a motion rig at some point, but I want to pick off all this low hanging 'immersion' fruit first.
Title: Re: Motion rig project
Post by: Chris_Beeves on July 14, 2022, 05:41:54 AM
Post by: Chris_Beeves on July 14, 2022, 05:41:54 AM
Quote from: mdlp on July 12, 2022, 07:36:25 AMIf I had a motion rig (if that's not a phrase that leads to trouble I don't know what is), I'd be tempted to have it a slightly lowered at the front at rest, with the clutch bite point reverting to level to simulate drive take-up.Front suspension travel does a good job of communicating acceleration on the prototype, so as soon as that works on the big rig I hope it will be enough.
Which may be ambitious as I don't know what telemetry data is available.
Title: Re: Motion rig project
Post by: Chris_Beeves on July 14, 2022, 05:46:25 AM
Post by: Chris_Beeves on July 14, 2022, 05:46:25 AM
Quote from: malcolm_from_nz on July 12, 2022, 11:44:12 PMDefinitely more distinct on some than others. CBR1000RR, quite distinct, RGV, reasonably distinct, 748R not much at all, SV1000 not much either. Do you have an email address, I could send you an STL if you like. Cable driven, hall effect sensor.
Next up is the gear shift. All the bikes have that distinct feeling of metal moving and notching into place, I want that. I've been working the various levers with my eyes closed trying to come up with what might replicate that, but no great ideas so far. I know I want a detent to click through, and the other thing is I want the detent tension to be load (engine load) sensitive. I want to be able to preload the lever like I would on a real bike, then back off the gas to let it snick into the next gear, like you would on a bike without a shift lever. Keen to hear any thoughts you might have on that. I think it can be done by the Arduino handling the TPS input, rather than having to receive telemetry via SimHub or whatever.
@mdlp Yes I know what you mean, replicate that 'chonk' as you click into first. The bike itself doesn't move (although I understand why that's probably not a bad way to replicate it, it uses existing mechanics you already paid for!), so I was thinking maybe a servo that lets a weight swing and hit a stop. That will require telemetry though, to know which gear you're in.
I'm quite keen to build a motion rig at some point, but I want to pick off all this low hanging 'immersion' fruit first.
The low hanging immersion is the complex bit. I'd start with motion and take it from there.
The rabbit hole is nice and deep!
Simhub shaker speakers does a good job of replicating gear clonk.
Title: Re: Motion rig project
Post by: davidboda46 on July 20, 2022, 02:01:11 PM
Post by: davidboda46 on July 20, 2022, 02:01:11 PM
Chris, you're rig looks absolutely amazing. I wish I had the skills, bits and the tools to do something similar, but I don't think I'll ever get there. Anyway, I'm super impressed, can't wait to see how it works when you done.
Cheers,
/David "Gonzo" Boda #46
Cheers,
/David "Gonzo" Boda #46
Title: Re: Motion rig project
Post by: Chris_Beeves on July 22, 2022, 01:59:35 PM
Post by: Chris_Beeves on July 22, 2022, 01:59:35 PM
Thanks! Haven't had any time other than assembling it since it got home so my fingers are itching to get started!
Title: Re: Motion rig project
Post by: Chris_Beeves on August 01, 2022, 03:39:56 PM
Post by: Chris_Beeves on August 01, 2022, 03:39:56 PM
Tested a few days back, but it turns out my outlets in the basement didn't have enough oumph.
So I pulled in three phases 16Amps each now, that should do it! A little bit hesitant to plug it in though.. These cables are massive ;D
So I pulled in three phases 16Amps each now, that should do it! A little bit hesitant to plug it in though.. These cables are massive ;D
Title: Re: Motion rig project
Post by: Chris_Beeves on August 02, 2022, 06:59:29 PM
Post by: Chris_Beeves on August 02, 2022, 06:59:29 PM
A cheesy teaser:
Title: Re: Motion rig project
Post by: doubledragoncc on August 03, 2022, 09:09:56 AM
Post by: doubledragoncc on August 03, 2022, 09:09:56 AM
Great work and fun video m8
Look forward to more vids.
DD
Look forward to more vids.
DD
Title: Re: Motion rig project
Post by: davidboda46 on August 06, 2022, 09:38:08 PM
Post by: davidboda46 on August 06, 2022, 09:38:08 PM
Awesome video Chris! :D
David "Gonzo" Boda #46
David "Gonzo" Boda #46
Title: Re: Motion rig project
Post by: Manu on August 07, 2022, 02:51:50 PM
Post by: Manu on August 07, 2022, 02:51:50 PM
Incredible work. Congratulations
Title: Re: Motion rig project
Post by: Chris_Beeves on August 10, 2022, 08:47:00 PM
Post by: Chris_Beeves on August 10, 2022, 08:47:00 PM
Thank you so much guys!
Had some time to play around with it a little more tonight after fixing stuff with the motion plugin.
It's marvelous...
Had some time to play around with it a little more tonight after fixing stuff with the motion plugin.
It's marvelous...
Title: Re: Motion rig project
Post by: Chris_Beeves on August 21, 2022, 08:49:39 PM
Post by: Chris_Beeves on August 21, 2022, 08:49:39 PM
After testing more in depth I'm finding some issues with the leaning. The design leaves the two front motors in charge of that, and when leaning hard one goes all the way up and the other one all the way down. The one going up has to lift everything, and it takes a lot of time. So it will need some attention. Or I need to lose 20-30kg. Or both.
Title: Re: Motion rig project
Post by: Chris_Beeves on September 01, 2022, 08:40:37 PM
Post by: Chris_Beeves on September 01, 2022, 08:40:37 PM
After designing a few possible solutions I gave up and just bought two spring struts.
Works perfect!
Let the tweaking begin!
Works perfect!
Let the tweaking begin!
Title: Re: Motion rig project
Post by: Chris_Beeves on September 20, 2022, 04:15:53 PM
Post by: Chris_Beeves on September 20, 2022, 04:15:53 PM
After putting the front springs on it became apparent that the rear was struggling as well, so I bought another spring.
Now on to other issues!
Redesigned the shifter mechanism, since everyone else that has tested the rig has broken it :D
Now on to other issues!
Redesigned the shifter mechanism, since everyone else that has tested the rig has broken it :D
Title: Re: Motion rig project
Post by: Chris_Beeves on October 10, 2022, 07:25:39 PM
Post by: Chris_Beeves on October 10, 2022, 07:25:39 PM
The new shifter assembly turned out quite nice!
It is horrible to mount, upside down under the rearset bar.. Not really engineered for assembly :D
It doesn't have the chunky clunk that I want, but it is more distinct (and durable so far) than the old solution.
The nicest part is the "print-in-one-piece" balljoint!
It is horrible to mount, upside down under the rearset bar.. Not really engineered for assembly :D
It doesn't have the chunky clunk that I want, but it is more distinct (and durable so far) than the old solution.
The nicest part is the "print-in-one-piece" balljoint!
Title: Re: Motion rig project
Post by: malcolm_from_nz on October 13, 2022, 08:55:02 PM
Post by: malcolm_from_nz on October 13, 2022, 08:55:02 PM
What provides the self centering? Just the buttons?
Title: Re: Motion rig project
Post by: Chris_Beeves on October 14, 2022, 03:38:28 AM
Post by: Chris_Beeves on October 14, 2022, 03:38:28 AM
No, there are two springs on the other side with some rubber in them. They are the reason the whole thing is a pain to mount :)
This is the first version with space for magnet end click. Didn't work out.

This is the first version with space for magnet end click. Didn't work out.
Title: Re: Motion rig project
Post by: malcolm_from_nz on October 14, 2022, 07:43:39 AM
Post by: malcolm_from_nz on October 14, 2022, 07:43:39 AM
Yeah I've wondered about magnets for that. What didn't work out with those?
Title: Re: Motion rig project
Post by: Chris_Beeves on October 14, 2022, 12:50:56 PM
Post by: Chris_Beeves on October 14, 2022, 12:50:56 PM
When they were strong enough to be noticeable the spring needed to be really strong in order to be able to push it back. It would just stick.
Title: Re: Motion rig project
Post by: malcolm_from_nz on October 14, 2022, 11:17:35 PM
Post by: malcolm_from_nz on October 14, 2022, 11:17:35 PM
What we need is some sort of two way ratchet that goes clunk when it changes position. I'll keep thinking about it. I've designed a lever arrangement much like you've shown above, but it has a positive centre stop so the lever always stops smartly in the centre like you would expect a bike to. I'll have a go at printing it this week and see how it goes.
My current goals are, limited movement on a positive stop, buttons working at the ends of the lever travel, always stop cleanly in the centre with little wobble.
If that all goes well, I'll add a hall effect sensor (use the in game preload function, although ultimately I want that to be a physical thing so I'll write an algorithm to handle it externally via servos) for analog input, and then figure out a 'block' for up and down when in 1st and top.
After spending some time riding around thinking about what really defines a motorcycle gearshift, it's those things, plus of course the clunk. Let me know if you see a mechanism that might replicate the clunk, I've no good ideas at this point and are just relying on a bass shaker. The closest I can think of is a firing mechanism from a rifle, with the wall and break.
My current goals are, limited movement on a positive stop, buttons working at the ends of the lever travel, always stop cleanly in the centre with little wobble.
If that all goes well, I'll add a hall effect sensor (use the in game preload function, although ultimately I want that to be a physical thing so I'll write an algorithm to handle it externally via servos) for analog input, and then figure out a 'block' for up and down when in 1st and top.
After spending some time riding around thinking about what really defines a motorcycle gearshift, it's those things, plus of course the clunk. Let me know if you see a mechanism that might replicate the clunk, I've no good ideas at this point and are just relying on a bass shaker. The closest I can think of is a firing mechanism from a rifle, with the wall and break.
Title: Re: Motion rig project
Post by: Chris_Beeves on October 18, 2022, 08:19:21 PM
Post by: Chris_Beeves on October 18, 2022, 08:19:21 PM
Just had a little gettogether with some motorcycle buddies this weekend. The shifter is now zip-tied and taped, but hanging in there. Needs beefing. ;D
Title: Re: Motion rig project
Post by: Slider46 on October 19, 2022, 06:23:08 PM
Post by: Slider46 on October 19, 2022, 06:23:08 PM
Quote from: Chris_Beeves on October 18, 2022, 08:19:21 PMJust had a little gettogether with some motorcycle buddies this weekend. The shifter is now zip-tied and taped, but hanging in there. Needs beefing. ;D
I spent 10 years as a bike instructor and it never ceased to amaze me how heavy handed/ footed people are especialy on the smaller cc bikes. No finesse, no mechanical sympathy, just stomp on the lever and wind the throttle hard on, lol.
I would have a quiet snigger at how much they would poop if they ever got a go on a blade or R1 and wound that back to the stop ;D ;D
Title: Re: Motion rig project
Post by: Chris_Beeves on October 19, 2022, 07:51:48 PM
Post by: Chris_Beeves on October 19, 2022, 07:51:48 PM
Mechanical sympathy, I love that! 😂
Not much of that going around the past weekend, correct!
Not much of that going around the past weekend, correct!
Title: Re: Motion rig project
Post by: Chris_Beeves on December 27, 2022, 12:29:25 PM
Post by: Chris_Beeves on December 27, 2022, 12:29:25 PM
Just saw I hadn't posted this vid here.
A better overview of what the sim does:
A better overview of what the sim does:
Title: Re: Motion rig project
Post by: Chris_Beeves on March 30, 2023, 06:57:21 AM
Post by: Chris_Beeves on March 30, 2023, 06:57:21 AM
There has been some improvements done lately. I have converted the old load cell brake system to a hydraulic one with ISR master cylinder and rear brake calipers with pressure sensors on them. It works really well and feels a whole lot more rigid than the predecessor.
You cannot see attachments on this board.
Also put a vibration speaker on the brake lever, and the feedback was awesome. Unfortunately it flipped out the torque sensors for the steering system completely, so I had to remove it. Put some small vibration motors on there instead and it's not as good, but a nice compromise.
You cannot see attachments on this board.
Also put a vibration speaker on the brake lever, and the feedback was awesome. Unfortunately it flipped out the torque sensors for the steering system completely, so I had to remove it. Put some small vibration motors on there instead and it's not as good, but a nice compromise.
Title: Re: Motion rig project
Post by: davidboda46 on April 26, 2023, 04:24:49 PM
Post by: davidboda46 on April 26, 2023, 04:24:49 PM
Ser helt fantastisk ut! Skulle gärna testa den någon dag. Ditt hantverkarskap är mäkta imponerande.
Ha det,
/David
Ha det,
/David
Title: Re: Motion rig project
Post by: Chris_Beeves on April 26, 2023, 08:37:19 PM
Post by: Chris_Beeves on April 26, 2023, 08:37:19 PM
Tack David! Hojta till om du ska till Göteborg något så kan vi säkert sy ihop något! Behöver testförare :)
Title: Re: Motion rig project
Post by: Chris_Beeves on October 23, 2023, 04:42:11 AM
Post by: Chris_Beeves on October 23, 2023, 04:42:11 AM
Spent the past week at the Technical University of Delft in the Netherlands at the Bicycle & Motorcycle dynamics conference. It's a place where industry people and researchers can meet up and present, discuss and test two wheeler simulation in every form.
Presented my motion theories and my steering concept and had great response.
Both researchers and industry people (MotoGP engineers among others) were impressed what GPbikes can do as a research tool.
It was a completely crazy awesome week that has given me a lot of motivation to continue developing the sim concept.
Presented my motion theories and my steering concept and had great response.
Both researchers and industry people (MotoGP engineers among others) were impressed what GPbikes can do as a research tool.
It was a completely crazy awesome week that has given me a lot of motivation to continue developing the sim concept.
Title: Re: Motion rig project
Post by: teeds on October 25, 2023, 11:14:26 AM
Post by: teeds on October 25, 2023, 11:14:26 AM
Quote from: Chris_Beeves on October 23, 2023, 04:42:11 AMIt's a place where industry people and researchers can meet up and present, discuss and test two wheeler simulation in every form.
I'm amazed that this is a thing, great to see and nicely done.
Title: Re: Motion rig project
Post by: Chris_Beeves on November 07, 2023, 04:50:53 AM
Post by: Chris_Beeves on November 07, 2023, 04:50:53 AM
Short demo of the steering in its current form:
It's a little too sensitive for my taste at the moment, but the handlebars unfortunately aren't beefy enough to handle full race torque yet. Working on rebuilding the entire steering hardware now.
It's a little too sensitive for my taste at the moment, but the handlebars unfortunately aren't beefy enough to handle full race torque yet. Working on rebuilding the entire steering hardware now.
Title: Re: Motion rig project
Post by: doubledragoncc on November 08, 2023, 10:06:07 AM
Post by: doubledragoncc on November 08, 2023, 10:06:07 AM
Brilliant work as always Chris.
DD
DD