Title: Project Realistic Rig
Post by: speedfr on December 08, 2017, 02:10:31 PM
Post by: speedfr on December 08, 2017, 02:10:31 PM
Hello riders,
yes, i'm having the guts to call it "Realistic"... We'll see.
But i've been riding my bike and others this last week to check the mouvement. I'm driving bike for more than 30 years and i never really paid attention to the cinetic even after watching every week-end every possible bike race in the world...better later than ever...
And then i tried to find a good way to reproduce what's happening on a bike AND that i could "ride" on my chair in front of my screen... --> GPB !!
Because i don't want do a real frame bike and having to use hydraulic or electric servo to shake, lean and move the frame. I don't have the room and more than that i don't have the money.
And so...
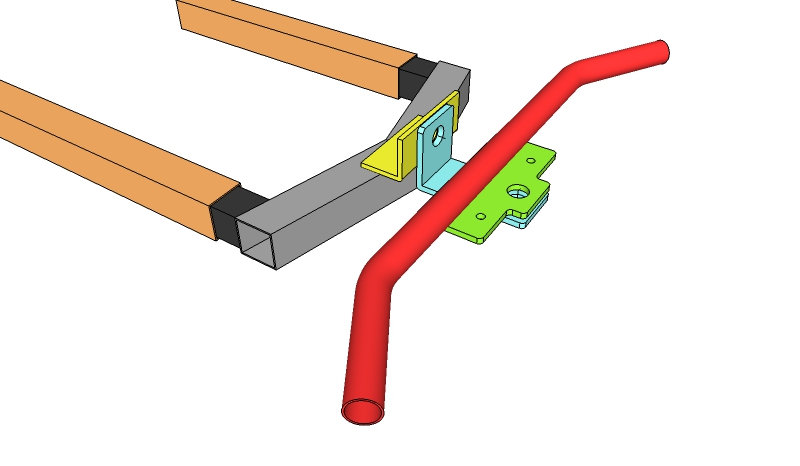
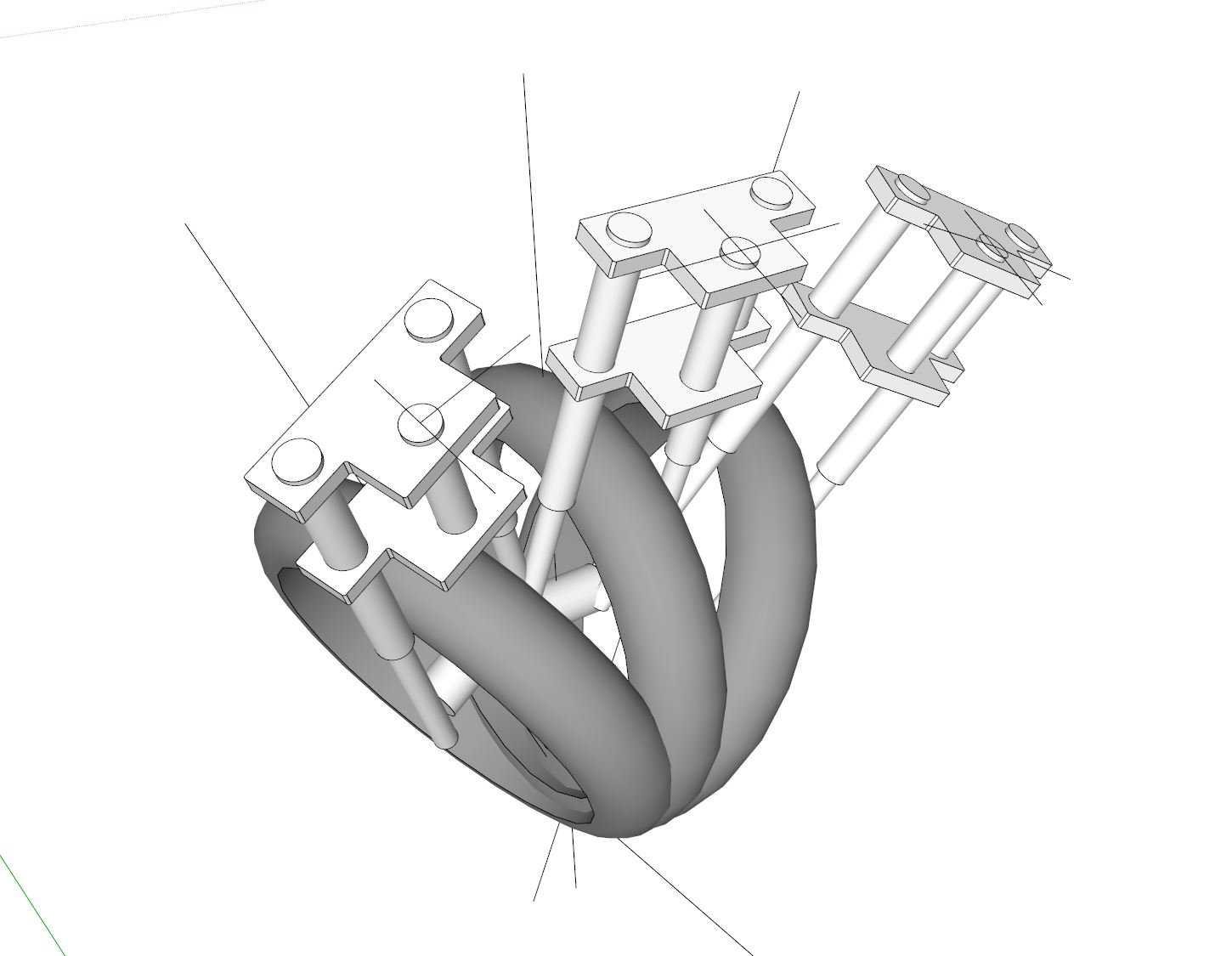
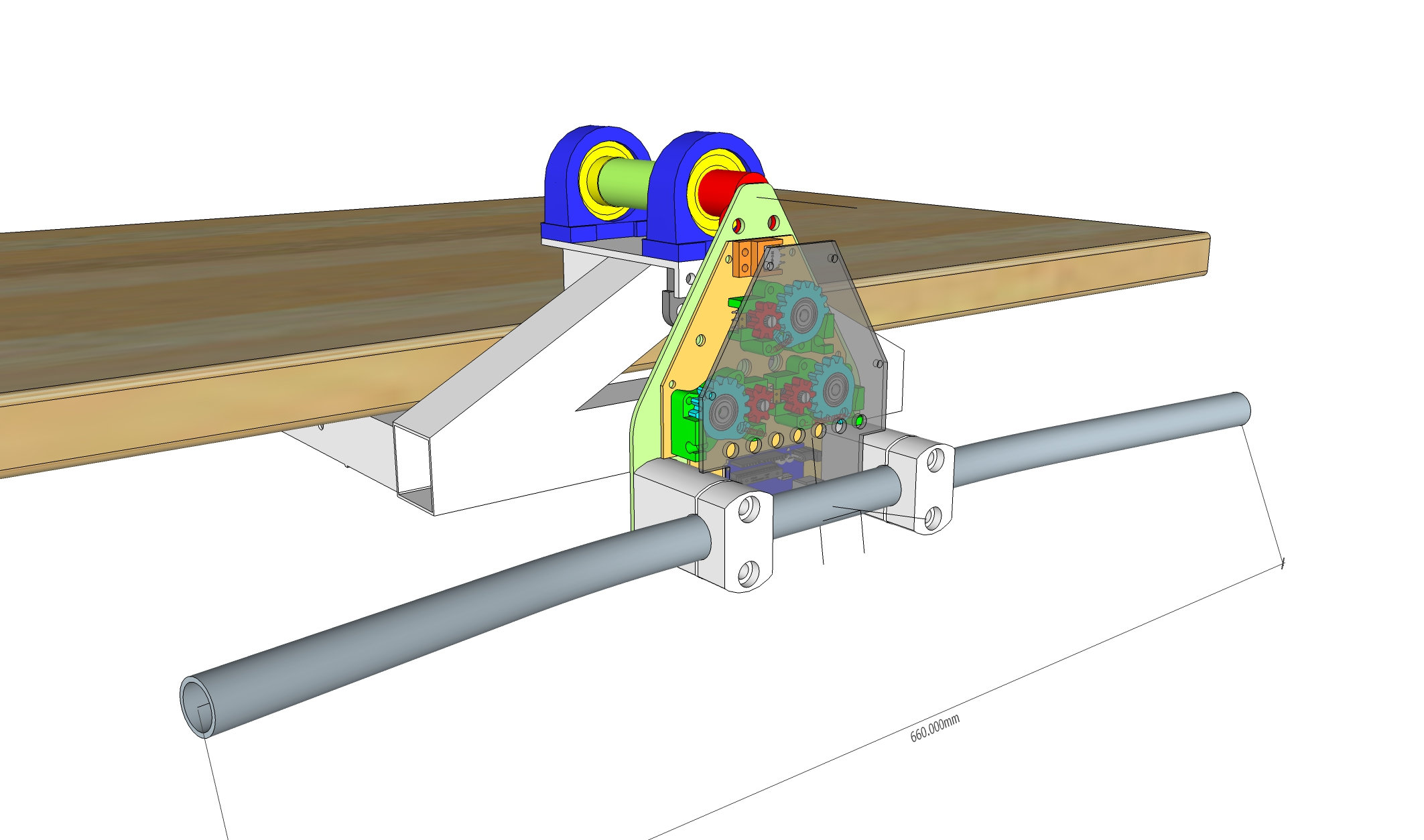
In red you have the handlebar that will be counter-steering to lean on the sides. This mouvement (vertical axe) will be short angle but hard to do (piece of metal into a big rubber that makes the mouvement harder - trying to reproduce what is real and what a steering absorber will do). The green piece will then turn left and right in a horizontal plan.
The blue part will be the driver leaning and can go on a horizontal axe from top to bottom, this will be a free mouvement, inside a "teflon" piece that will make the mouvement smooth (as in a bearing wheel).
Obviously, the feet parts are missing - brake and gear - and all the buttons on the handlebar but that easy stuff, what was annoying is to find a way to reproduce counter-sterring as it is in real life. I want a be able to ride in GPB without thinking of the device, just being absorbed by the screen. Like Assetto Corsa with a steering wheel, you forget about the device, you drive.
Now it's going to be time to make a prototype and then improve the stuff.
Thanks again to DD because he helped me a lot with the Leobodnar stuff and since HS1, HS2 and soon HS3, we have of excellence to follow, doing my best !!! (and if i could buy one and race instead of burning my brain into that rig, i'd prefer !!! )
 (http://zupimages.net/viewer.php?id=17/49/4ra7.jpg)
(http://zupimages.net/viewer.php?id=17/49/4ra7.jpg)
yes, i'm having the guts to call it "Realistic"... We'll see.
But i've been riding my bike and others this last week to check the mouvement. I'm driving bike for more than 30 years and i never really paid attention to the cinetic even after watching every week-end every possible bike race in the world...better later than ever...
And then i tried to find a good way to reproduce what's happening on a bike AND that i could "ride" on my chair in front of my screen... --> GPB !!
Because i don't want do a real frame bike and having to use hydraulic or electric servo to shake, lean and move the frame. I don't have the room and more than that i don't have the money.
And so...
In red you have the handlebar that will be counter-steering to lean on the sides. This mouvement (vertical axe) will be short angle but hard to do (piece of metal into a big rubber that makes the mouvement harder - trying to reproduce what is real and what a steering absorber will do). The green piece will then turn left and right in a horizontal plan.
The blue part will be the driver leaning and can go on a horizontal axe from top to bottom, this will be a free mouvement, inside a "teflon" piece that will make the mouvement smooth (as in a bearing wheel).
Obviously, the feet parts are missing - brake and gear - and all the buttons on the handlebar but that easy stuff, what was annoying is to find a way to reproduce counter-sterring as it is in real life. I want a be able to ride in GPB without thinking of the device, just being absorbed by the screen. Like Assetto Corsa with a steering wheel, you forget about the device, you drive.
Now it's going to be time to make a prototype and then improve the stuff.
Thanks again to DD because he helped me a lot with the Leobodnar stuff and since HS1, HS2 and soon HS3, we have of excellence to follow, doing my best !!! (and if i could buy one and race instead of burning my brain into that rig, i'd prefer !!! )
(http://zupimages.net/viewer.php?id=17/49/4ra7.jpg)
Title: Re: Project Realistic Rig
Post by: poumpouny on December 08, 2017, 02:23:50 PM
Post by: poumpouny on December 08, 2017, 02:23:50 PM
good idea but i doubt it will be natural to move into 2 direction on the same mouvement, i think on axes for the steering and ed tracker for the lean will be more natural ! the other problem is that if you want to use counter steering, you must switch to DSA or DST hardcore mode, and thoses modes without ffb is very difficult to handle cause you don't have any feedback to know where is the bike lean limit ! anyways i wish you the best with your rig
Edit : Or may be it would be more natural if you move the steer in the mid of the lean axis, that way you controll the lean by pushig the handlebar instead of swinging it !
Edit : Or may be it would be more natural if you move the steer in the mid of the lean axis, that way you controll the lean by pushig the handlebar instead of swinging it !
Title: Re: Project Realistic Rig
Post by: speedfr on December 08, 2017, 03:22:37 PM
Post by: speedfr on December 08, 2017, 03:22:37 PM
Hello Poumpouny,
and thank you for your feedback, i always consider than more brains are on a problem, better the solution will be at the end !!
And about what you says :
About natural mouvement, as i said i spent hours this last week analysing the mouvement, even put the GoPro of my son to film my hands and handlebar on my Pan European or on my other son ER-6 Kawa and i found on images what i was doing without really knowing.
And this mouvement, despite what you think, is or begging natural to me as every motorbike riders that ride for a while.
About the horizontal axe moved by the fact that i counter-steer on the vertical axe, this other idea (i post the "old" one - from 2 days) and this one is the news one from this morning at the breakfast time.
And i think that will absorb more the bike leaning mouvement to not trouble the rider leaning movement. Or, if it perturb anyway, i will have to make the rider leaning harder. I want to try anyway because that's how it feels to me.
About EdTracker Pro, that i use since it's out on the market, i will only put the Back and Front rider leaning.
I will be seating on my chair, not on the frame that's gonna move left and right.
So yes, want to ride a bike seating on a chair looks akward but that's the challenge.
About FFB, yes, i would love to FFB my vertical axe but i'm not sure (that was my question to DD) that the FFB is actually to copy the reality, meaning bloking me to turn if i brake hard, as in reality. And on a race, guys are allways braking to late and have to force down the bike on the side they want to go. Its natural centrifuge and centripete forces, plus the gravity and the wheels inertial mouvement. On the regular street bike, you brake, turn and the accelerate, on a race bike you gonna brake and turn but still brake on your turn (on the angle) so braking will have a tendancy to make the bike stand back up to the vertical and is going to refuse to steer and then you have to force it to put it into the curve, that's what i will love to find with FFB but i'm not sure it acts like that. (where to catch the data for that ?, as i wrote somewhere else, as a Motec in racing cars).
And about DSA or DST i have no idea what is it, information in here and about the game is an archeology type of thing, so if you know what it is, i'll be more than happy to learn about it...
(what you say about vertical axe is interesting and i started to draw something like that but the draw isn't finished, i'll give it a try to the end of design and post it in here)
 (http://zupimages.net/viewer.php?id=17/49/eyn3.jpg)
(http://zupimages.net/viewer.php?id=17/49/eyn3.jpg)
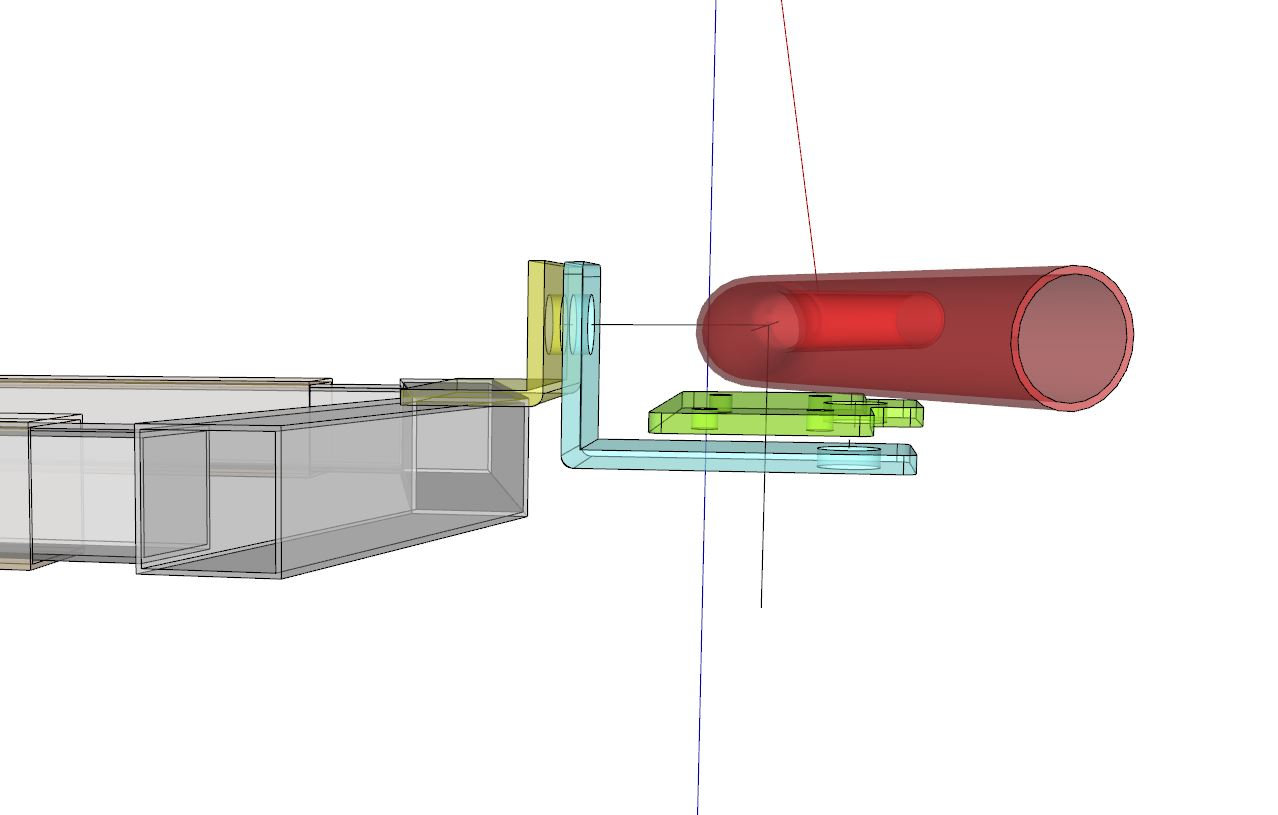
Edit : what you couldn't see in the other draws is that the horizontal axis on the handlebar is at the same axis as the riders leaning axis. So if i push my handlebar in a horizontal plan (to counter steer), it won't be pushing the rider leaning left and right.
And if DSA or DST doesn't give any feedback, i was thinking of using limiter after calibrating is done in order to give myself a max angle of 60° or something around that. (today, i'm using a joystick and a drum pedals with EdTracker on it for the rear brake, it's a catastrophy !! and i have no feedback anyway so...)
 (http://zupimages.net/viewer.php?id=17/49/sdv4.jpg)
(http://zupimages.net/viewer.php?id=17/49/sdv4.jpg)
and thank you for your feedback, i always consider than more brains are on a problem, better the solution will be at the end !!
And about what you says :
About natural mouvement, as i said i spent hours this last week analysing the mouvement, even put the GoPro of my son to film my hands and handlebar on my Pan European or on my other son ER-6 Kawa and i found on images what i was doing without really knowing.
And this mouvement, despite what you think, is or begging natural to me as every motorbike riders that ride for a while.
About the horizontal axe moved by the fact that i counter-steer on the vertical axe, this other idea (i post the "old" one - from 2 days) and this one is the news one from this morning at the breakfast time.
And i think that will absorb more the bike leaning mouvement to not trouble the rider leaning movement. Or, if it perturb anyway, i will have to make the rider leaning harder. I want to try anyway because that's how it feels to me.
About EdTracker Pro, that i use since it's out on the market, i will only put the Back and Front rider leaning.
I will be seating on my chair, not on the frame that's gonna move left and right.
So yes, want to ride a bike seating on a chair looks akward but that's the challenge.
About FFB, yes, i would love to FFB my vertical axe but i'm not sure (that was my question to DD) that the FFB is actually to copy the reality, meaning bloking me to turn if i brake hard, as in reality. And on a race, guys are allways braking to late and have to force down the bike on the side they want to go. Its natural centrifuge and centripete forces, plus the gravity and the wheels inertial mouvement. On the regular street bike, you brake, turn and the accelerate, on a race bike you gonna brake and turn but still brake on your turn (on the angle) so braking will have a tendancy to make the bike stand back up to the vertical and is going to refuse to steer and then you have to force it to put it into the curve, that's what i will love to find with FFB but i'm not sure it acts like that. (where to catch the data for that ?, as i wrote somewhere else, as a Motec in racing cars).
And about DSA or DST i have no idea what is it, information in here and about the game is an archeology type of thing, so if you know what it is, i'll be more than happy to learn about it...
(what you say about vertical axe is interesting and i started to draw something like that but the draw isn't finished, i'll give it a try to the end of design and post it in here)
(http://zupimages.net/viewer.php?id=17/49/eyn3.jpg)Edit : what you couldn't see in the other draws is that the horizontal axis on the handlebar is at the same axis as the riders leaning axis. So if i push my handlebar in a horizontal plan (to counter steer), it won't be pushing the rider leaning left and right.
And if DSA or DST doesn't give any feedback, i was thinking of using limiter after calibrating is done in order to give myself a max angle of 60° or something around that. (today, i'm using a joystick and a drum pedals with EdTracker on it for the rear brake, it's a catastrophy !! and i have no feedback anyway so...)
(http://zupimages.net/viewer.php?id=17/49/sdv4.jpg)
Title: Re: Project Realistic Rig
Post by: matty0l215 on February 01, 2018, 05:58:57 PM
Post by: matty0l215 on February 01, 2018, 05:58:57 PM
Interesting idea!
I will be following this one :)
I will be following this one :)
Title: Re: Project Realistic Rig
Post by: speedfr on February 01, 2018, 06:20:29 PM
Post by: speedfr on February 01, 2018, 06:20:29 PM
Hi Matty,
i'm in the middle of testing how to display an image AND resizing it.
Working on
And now it works (the forum doesn't like the short BB code.)
I am a HAPPY BUNNY ©DD

i'm in the middle of testing how to display an image AND resizing it.
Working on
Code Select
[img] code and i'll be back with the second chapter ;DAnd now it works (the forum doesn't like the short BB code.)
I am a HAPPY BUNNY ©DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 01, 2018, 06:43:12 PM
Post by: speedfr on February 01, 2018, 06:43:12 PM
Yes, I'm a HAPPY BUNNY !!
Second Chapter of this intense story...
Always heading for my most realistic possible system, I just gave a few draws in here but I did a bunch, submit them to DD know-how and after long skype session, he convince me that the way the HS work (pendular system) is the one that gonna hurt me the less if playing for a while. Sure I'm not 20...
So, after all that, DD allowed me to purely copy his system, and at the same time, I ordered him some parts to start my project.
Yes, it's a start. Because I'm going to need to have 2 handlebars to play GP Bikes. My youngest son (18) is thrilled by the game and once he will see and try the handlebar on GP Bikes, he will refuse to use the Xbox pad which he doesn't like already...
So yes, DD parts are there for me to start with and have a base.
Then I'm going to equip that, set the system in place and I would guess that the next two weeks are going to be around this main objective.
And, proud as I am, I want to make a little unboxing kind of thing, of the masterpiece printed with ABS by DD, the quality is incredible and it seems super sturdy. He found me an extra main-plate and all the electronics parts from Leo Bodnar that I need. Plus all the little parts for the cables, screws, it is great.
One more time big up for DoubleDragon to offer me this opportunity, thanks again for all the time you spent on Skype, on mails, this special package you made for me and all your kidness for this kid that I am.
Better than words, pictures :
Opening the package, find that on top. ;D
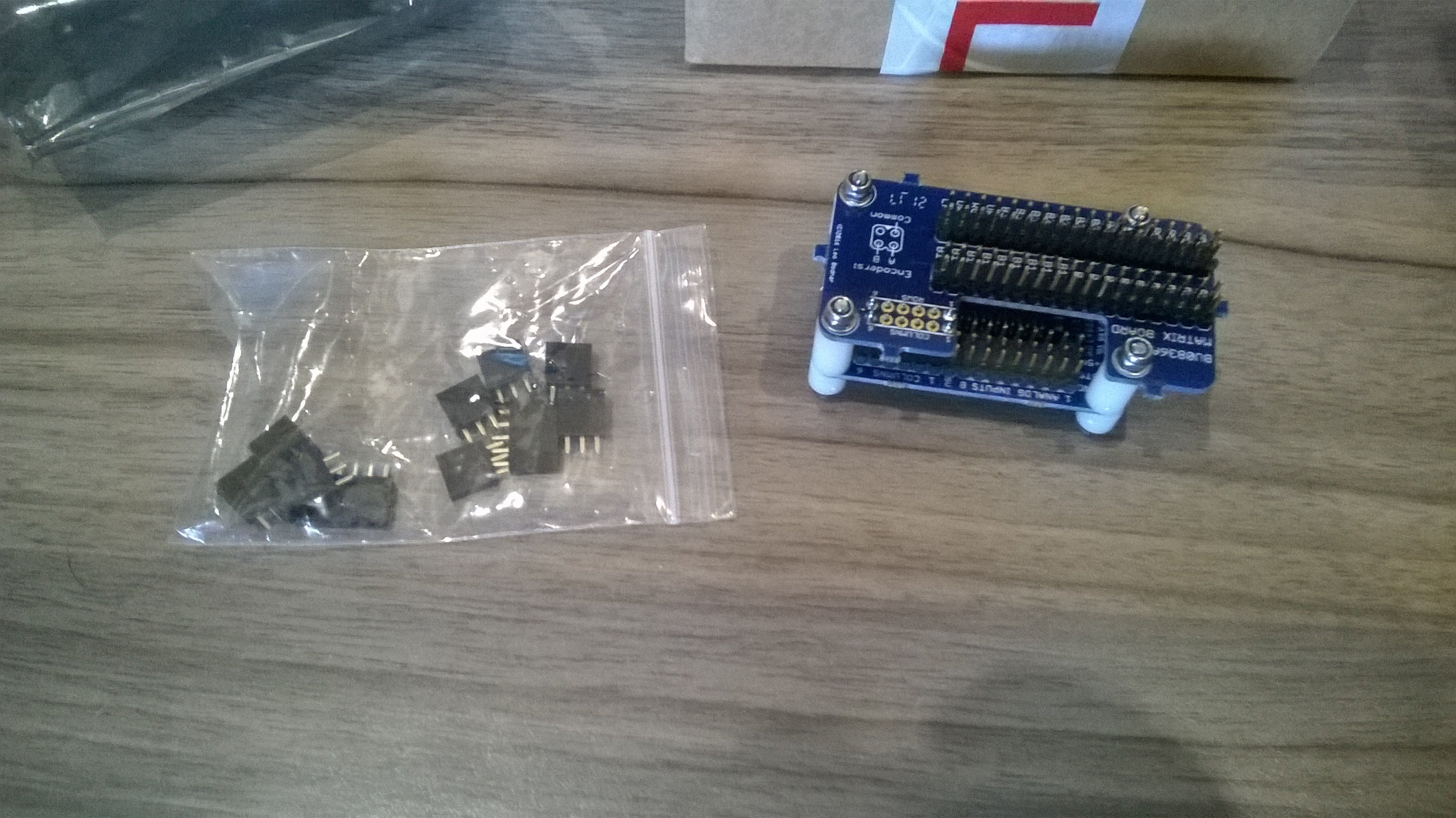
Here is the Leo Bodnar, all setup in R&D lab at IAS Computer Controls by Allan. 8)
A box with 2 P260 and the system for the spring on the lever. (Brake and Clutch)

Two handlebar support for 22mm tube.

The main object... :o

The main plate with three ABS printed system for the potentiometers.

The quality is incredible, ABS is perfect, and it moves perfectly with no friction ! Awesome work :-*

See you soon for the WIP and the third Chapter. ;)
Second Chapter of this intense story...
Always heading for my most realistic possible system, I just gave a few draws in here but I did a bunch, submit them to DD know-how and after long skype session, he convince me that the way the HS work (pendular system) is the one that gonna hurt me the less if playing for a while. Sure I'm not 20...
So, after all that, DD allowed me to purely copy his system, and at the same time, I ordered him some parts to start my project.
Yes, it's a start. Because I'm going to need to have 2 handlebars to play GP Bikes. My youngest son (18) is thrilled by the game and once he will see and try the handlebar on GP Bikes, he will refuse to use the Xbox pad which he doesn't like already...
So yes, DD parts are there for me to start with and have a base.
Then I'm going to equip that, set the system in place and I would guess that the next two weeks are going to be around this main objective.
And, proud as I am, I want to make a little unboxing kind of thing, of the masterpiece printed with ABS by DD, the quality is incredible and it seems super sturdy. He found me an extra main-plate and all the electronics parts from Leo Bodnar that I need. Plus all the little parts for the cables, screws, it is great.
One more time big up for DoubleDragon to offer me this opportunity, thanks again for all the time you spent on Skype, on mails, this special package you made for me and all your kidness for this kid that I am.
Better than words, pictures :
Opening the package, find that on top. ;D
Here is the Leo Bodnar, all setup in R&D lab at IAS Computer Controls by Allan. 8)
A box with 2 P260 and the system for the spring on the lever. (Brake and Clutch)
Two handlebar support for 22mm tube.
The main object... :o
The main plate with three ABS printed system for the potentiometers.
The quality is incredible, ABS is perfect, and it moves perfectly with no friction ! Awesome work :-*
See you soon for the WIP and the third Chapter. ;)
Title: Re: Project Realistic Rig
Post by: Vini on February 01, 2018, 08:22:16 PM
Post by: Vini on February 01, 2018, 08:22:16 PM
a shame you let DD convince you to ditch the "true countersteering".
Title: Re: Project Realistic Rig
Post by: speedfr on February 01, 2018, 08:50:28 PM
Post by: speedfr on February 01, 2018, 08:50:28 PM
I understand what you meant Vini97 but two things :
-First, the vertical axis is the problem as well as the solution.
It will need to steer easely at low speed and get tuff at higher speed (starting around 40km/h but actually when Gyroscopic forces will says !! ) which means having data coming from the software to engage some kinds of resistance (torque system with FFB inside) on this axis when the horizontal axis (leaning) will be on regular axis-bearings-spring.
On my mind, i was going to need something like a silent bloc, a hard one, and needed to measure the movement to induct the steer/counter steer.
But even with those, the risk is big that the strenth input will force the leaning so that's not solved on a simple idea, it needs programming and driving a FFB engine to give you feelback. Not that simple.
Probably possible since GP Bikes can send data outside (like the ones used in MaxHUD) but not yet for me, need more investigation and more capacities that i don't have even if I am a DIYer and love to work with my hands.
In conclusion, later or maybe will stay as a dream, but not in the sight now.
Second is that i paid attention to my movement on my bike, for like 2 weeks, constantly "studying" my rides.
And DD pendular system forces you to move in a way that correspond exactly to a bike movement.
On the video where Gren rides at the Holovis Lab (on DD Youtube Channel), look how Gren moves taking and exiting a curve.
That's exactly what you and I do on our IRL bikes.
His look (because he doesn't have a screen to fix with his eyes) goes to the apex, he his inside in Vr thing and his head goes exactly as in reality.
I mean the move is "natural" for a rider.
And so far, because it's "makable" for me, i think it will be the best.
I saw a lot of DD videos, and its about years that he works on his system, he knows a lot about that, his knowledge and experience is precious.
The real counter-steering request first a lot more thinking in order to have, sitting on a chair, the same feelings as sitting on my bike.
What i understood, is mostly that i need to go back to my studies about it and for now, i'm going to have a handlebar to finally ride as much as I want, as regular as I want - repeating the same lap more than once - and mostly with the same feeling or at least something familiar.
Always better than a joystick, a drum pedal or a broken wheel to ride GP bikes. ;)
-First, the vertical axis is the problem as well as the solution.
It will need to steer easely at low speed and get tuff at higher speed (starting around 40km/h but actually when Gyroscopic forces will says !! ) which means having data coming from the software to engage some kinds of resistance (torque system with FFB inside) on this axis when the horizontal axis (leaning) will be on regular axis-bearings-spring.
On my mind, i was going to need something like a silent bloc, a hard one, and needed to measure the movement to induct the steer/counter steer.
But even with those, the risk is big that the strenth input will force the leaning so that's not solved on a simple idea, it needs programming and driving a FFB engine to give you feelback. Not that simple.
Probably possible since GP Bikes can send data outside (like the ones used in MaxHUD) but not yet for me, need more investigation and more capacities that i don't have even if I am a DIYer and love to work with my hands.
In conclusion, later or maybe will stay as a dream, but not in the sight now.
Second is that i paid attention to my movement on my bike, for like 2 weeks, constantly "studying" my rides.
And DD pendular system forces you to move in a way that correspond exactly to a bike movement.
On the video where Gren rides at the Holovis Lab (on DD Youtube Channel), look how Gren moves taking and exiting a curve.
That's exactly what you and I do on our IRL bikes.
His look (because he doesn't have a screen to fix with his eyes) goes to the apex, he his inside in Vr thing and his head goes exactly as in reality.
I mean the move is "natural" for a rider.
And so far, because it's "makable" for me, i think it will be the best.
I saw a lot of DD videos, and its about years that he works on his system, he knows a lot about that, his knowledge and experience is precious.
The real counter-steering request first a lot more thinking in order to have, sitting on a chair, the same feelings as sitting on my bike.
What i understood, is mostly that i need to go back to my studies about it and for now, i'm going to have a handlebar to finally ride as much as I want, as regular as I want - repeating the same lap more than once - and mostly with the same feeling or at least something familiar.
Always better than a joystick, a drum pedal or a broken wheel to ride GP bikes. ;)
Title: Re: Project Realistic Rig
Post by: Vini on February 01, 2018, 09:46:38 PM
Post by: Vini on February 01, 2018, 09:46:38 PM
Quote from: speedfr on February 01, 2018, 08:50:28 PMSecond is that i paid attention to my movement on my bike, for like 2 weeks, constantly "studying" my rides.I believe that. The pendular system should emulate the correct relative position and angle of the handlebar to the rider. The resulting forces one has to apply to the handlebar should be very similar to what you need to do on a real bike (countersteering).
And DD pendular system forces you to move in a way that correspond exactly to a bike movement.
My ideal controller for GPB would essentially look similar to DD's but work a bit differently. The handlebar would be swung left/right by a strong electric motor, firmly holding it in place against direct user inputs (output only). The swinging arm holding the handlebar would be a tube that can rotate around itself, acting as the (vertical) steering axis just like on a real bike.
If calibrated properly, this system should result in exactly the same user movements as DD's system does but with the big difference of giving actual feedback from the front. So for example if the front starts to chatter or if the rear steps out, you would feel (and see) it on the steering axis, independently of the lean angle. Also, steering would become harder as the speed increases.
As you said, the challenge is using the steering axis simultaneously as a torque input and output (resisting the input). Theoretically it is possible since GPB outputs all necessary data and accepts steering torque as an input (using DST mode). It's a pure engineering problem.
Title: Re: Project Realistic Rig
Post by: speedfr on February 01, 2018, 10:00:54 PM
Post by: speedfr on February 01, 2018, 10:00:54 PM
Exactly.
Will need to have the counter engine inside the tube. And if we want real torque resistance, it will turn into a hydraulique system, because the electric motor can't have the necessary gear to create the force.
Hydraulic means pump, heavy fat tubes or metallic ones, a reservoir of hydraulic fluid and energy.
But the hydraulic distributor then need to be driven by the data coming from GP bikes = the torque on the axis that seats under our handlebar (i found the word : steering column ;D )
it will request a programm that control the distributor action.
At the same time, the leaning axis has to force against you, same thing, by hydraulic, to make the leaning harder to take when fast on a curve, i mean you need to force on the inside foot to help the bike turn so, that request another hydraulic actuator and distributor.
That's for staying on a chair or kind of bike seat.
Because, after that you can steal a RX6 and put it on a board with 6 DOF and that might become more simple... ;D
I think what we are looking for is possible but exactly as you said, it request a big engineering thinking.
Edit : And to do even better or more close to reality, the best will be to have the horizontal axis ... on the floor, where the front wheel hits the ground. Exactly there. And reading angle or hydraulic actuator will go there to. But the seat need to move sideways....
Crazy thing to think about already... but.... :o
Will need to have the counter engine inside the tube. And if we want real torque resistance, it will turn into a hydraulique system, because the electric motor can't have the necessary gear to create the force.
Hydraulic means pump, heavy fat tubes or metallic ones, a reservoir of hydraulic fluid and energy.
But the hydraulic distributor then need to be driven by the data coming from GP bikes = the torque on the axis that seats under our handlebar (i found the word : steering column ;D )
it will request a programm that control the distributor action.
At the same time, the leaning axis has to force against you, same thing, by hydraulic, to make the leaning harder to take when fast on a curve, i mean you need to force on the inside foot to help the bike turn so, that request another hydraulic actuator and distributor.
That's for staying on a chair or kind of bike seat.
Because, after that you can steal a RX6 and put it on a board with 6 DOF and that might become more simple... ;D
I think what we are looking for is possible but exactly as you said, it request a big engineering thinking.
Edit : And to do even better or more close to reality, the best will be to have the horizontal axis ... on the floor, where the front wheel hits the ground. Exactly there. And reading angle or hydraulic actuator will go there to. But the seat need to move sideways....
Crazy thing to think about already... but.... :o
Title: Re: Project Realistic Rig
Post by: speedfr on February 01, 2018, 10:26:11 PM
Post by: speedfr on February 01, 2018, 10:26:11 PM
Here a example of the movement with 20° steering/counter-steering max ( 2 times 10° forward axis) and 48° lean angle (2 times 24° vertical axis).
I don't know where we sit on this configuration but, the seat is going to have to go sideways a little bit or shoulders or wrist problems gonna come fast.
I don't know where we sit on this configuration but, the seat is going to have to go sideways a little bit or shoulders or wrist problems gonna come fast.
Title: Re: Project Realistic Rig
Post by: Vini on February 01, 2018, 10:47:19 PM
Post by: Vini on February 01, 2018, 10:47:19 PM
you would have to scale both axis of course but if DD's controller doesn't give you shoulder problems, then this system should be fine, too.
the few centimeters of additional absolute movement of the handlebar stubs can be easily compensated by slightly leaning your body, which you are probably doing already anyways with DD's system.
the few centimeters of additional absolute movement of the handlebar stubs can be easily compensated by slightly leaning your body, which you are probably doing already anyways with DD's system.
Title: Re: Project Realistic Rig
Post by: speedfr on February 01, 2018, 10:53:01 PM
Post by: speedfr on February 01, 2018, 10:53:01 PM
I'll tell you as soon as i'll do...
but i still have to puts everything together. ;)
but i still have to puts everything together. ;)
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 01, 2018, 10:55:04 PM
Post by: doubledragoncc on February 01, 2018, 10:55:04 PM
I dont "slightly lean my body" even on the couch. The SPSS system will have you fully leaning once you get into it. I found in VR over at Holovis I was on the limit of leaning a few times as I got a bit carried away with it lol.
One thing most forget when thinking about designing a system is that ALL software even GPB demands a certain amount of input to work correctly. If you design a system to work EXACTLY like a real bike you will crash all the time as you will have to sensetive movement at the bars due to the fact you hardly move the bars at all in real life. After 8 solid years working on all types of designs I know just how bad it can be lol.
I will give you all details on wiring the BU board and other points on skype speedfr.
DD
One thing most forget when thinking about designing a system is that ALL software even GPB demands a certain amount of input to work correctly. If you design a system to work EXACTLY like a real bike you will crash all the time as you will have to sensetive movement at the bars due to the fact you hardly move the bars at all in real life. After 8 solid years working on all types of designs I know just how bad it can be lol.
I will give you all details on wiring the BU board and other points on skype speedfr.
DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 01, 2018, 11:01:34 PM
Post by: speedfr on February 01, 2018, 11:01:34 PM
Quote from: doubledragoncc on February 01, 2018, 10:55:04 PM
.... I found in VR over at Holovis I was on the limit of leaning a few times as I got a bit carried away with it lol.
....
I will give you all details on wiring the BU board and other points on skype speedfr.
DD
That's what i was kind of worried when looking at Gren, it needs big matress on the side of the structure because if you start to be "inside" the screen, you might fall or need to be in good shape. Gyroscopic and Centrifugal forces will always be the problem.
@DD : i'll come to you tomorrow afternoon if you are around. ;)
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 01, 2018, 11:14:25 PM
Post by: doubledragoncc on February 01, 2018, 11:14:25 PM
I have a guy coming over to try the system tomorrow so can we talk on Sunday. I can also make a wiring diagram for you too.
DD
DD
Title: Re: Project Realistic Rig
Post by: poumpouny on February 02, 2018, 06:15:42 AM
Post by: poumpouny on February 02, 2018, 06:15:42 AM
I think the only way you could really mimic real life bike handling is the following :
have a bike frame monted on a motion system (i think even 2 Dof is enough) with the axis of rotation on the wheel position. the motion system will be receiving the bike leaning information from gpbikes.
Then you have a handlebar mounted like the way it would be in real life with a ffb motor and electronically locked at 20° when you reach 40 km/h. it will directly controll the steering input on gpbikes.
Then you'll have an ed tracker mounted on your head or your shoulder that will input the rider lean to gpbike.
The steering input plus the rider lean input will dictated the bike lean angle wich will be outpouted by gpbikes to the frame motion system.
With that system, you'll solve the problem of the missing gyroscope force wich will be not present as in real life because you have just to turn the steering the opposite side when you want to go back straight after leanin, to also limit the effort you have to make when staying at full lean position, you can limit the frame leaning angle to a smaller angle than IRL.
The main problem with that rig is of course the price !
The second one is that nobody is producing such a rig till now so you have to make it yourself.
So i think you if you are not a millionaire, and don't have Einstein's QI (wich i think 90% of normal people are) then DD's handle bar is the perfect solution.
have a bike frame monted on a motion system (i think even 2 Dof is enough) with the axis of rotation on the wheel position. the motion system will be receiving the bike leaning information from gpbikes.
Then you have a handlebar mounted like the way it would be in real life with a ffb motor and electronically locked at 20° when you reach 40 km/h. it will directly controll the steering input on gpbikes.
Then you'll have an ed tracker mounted on your head or your shoulder that will input the rider lean to gpbike.
The steering input plus the rider lean input will dictated the bike lean angle wich will be outpouted by gpbikes to the frame motion system.
With that system, you'll solve the problem of the missing gyroscope force wich will be not present as in real life because you have just to turn the steering the opposite side when you want to go back straight after leanin, to also limit the effort you have to make when staying at full lean position, you can limit the frame leaning angle to a smaller angle than IRL.
The main problem with that rig is of course the price !
The second one is that nobody is producing such a rig till now so you have to make it yourself.
So i think you if you are not a millionaire, and don't have Einstein's QI (wich i think 90% of normal people are) then DD's handle bar is the perfect solution.
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 02, 2018, 10:26:50 AM
Post by: doubledragoncc on February 02, 2018, 10:26:50 AM
Thanks for the compliment PP
You need to use the edtracker on the shoulder NOT the head as I have fully tested it and have a harness design that works fine for it.
Price is always the point here. I will not be having that problem at Holovis lol, BUT, you MUST limit lean of the system or it becomes VERY dangerous as there is no force of nature to keep you in the seat and on the bike as you can NOT replicate the speed of movement unless you have a great big building and MILLIONS to build it lol.
The biggest issue that many have is understanding handlebar input amount. You can not use the small amout that a real bike uses in real life as it would be worse than a gamepad for sensetivity. If you keep the input axis on the horizontal you will then be making unrealistic amounts of turn on the bars to keep control of the bike. Using force will also be over sensitve as you can not control it in such small amounts and once again you will have too much sensetivity.
It is truely the hardest thing to get perfect and people need to understand you MUST compromise or you will just make a dangerous and over sensitive system.
DD
You need to use the edtracker on the shoulder NOT the head as I have fully tested it and have a harness design that works fine for it.
Price is always the point here. I will not be having that problem at Holovis lol, BUT, you MUST limit lean of the system or it becomes VERY dangerous as there is no force of nature to keep you in the seat and on the bike as you can NOT replicate the speed of movement unless you have a great big building and MILLIONS to build it lol.
The biggest issue that many have is understanding handlebar input amount. You can not use the small amout that a real bike uses in real life as it would be worse than a gamepad for sensetivity. If you keep the input axis on the horizontal you will then be making unrealistic amounts of turn on the bars to keep control of the bike. Using force will also be over sensitve as you can not control it in such small amounts and once again you will have too much sensetivity.
It is truely the hardest thing to get perfect and people need to understand you MUST compromise or you will just make a dangerous and over sensitive system.
DD
Title: Re: Project Realistic Rig
Post by: Vini on February 02, 2018, 03:58:43 PM
Post by: Vini on February 02, 2018, 03:58:43 PM
I don't think a full motion system with a movable bike frame is the way to go. Way too expensive, complex and slow and it will not be anymore realistic than VR + DD's pendular system (with an additional vertical steering axis). Without centrifugal forces this is the most real it gets IMO.
For the rider movement control I still think a mat with pressure sensors would be ideal since you move around on your chair automatically anyhow.
For the rider movement control I still think a mat with pressure sensors would be ideal since you move around on your chair automatically anyhow.
Quote from: doubledragoncc on February 02, 2018, 10:26:50 AMThe biggest issue that many have is understanding handlebar input amount. You can not use the small amout that a real bike uses in real life as it would be worse than a gamepad for sensetivity.Of course the steering input needs to be torque based not position/angle based.
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 02, 2018, 04:13:23 PM
Post by: doubledragoncc on February 02, 2018, 04:13:23 PM
Sorry vin but you are still not getting it when it comes to using torque or pressure to steer. Because the movement would be so minimul doing it that way it will be FAR TOO sensitive and you would NOT have real control of the bike. I have tried and it was hell as it was just way to sensitive, even worse than a gamepad.
Unless you like flopping from side to side that is lol
DD
Unless you like flopping from side to side that is lol
DD
Title: Re: Project Realistic Rig
Post by: Vini on February 02, 2018, 04:23:01 PM
Post by: Vini on February 02, 2018, 04:23:01 PM
i don't see how the amount of movement is relevant when talking about torque transducers.
what was your setup when you did those tests? i assume you used DST mode but how did you manage to use the steering axis for both torque input and output?
what was your setup when you did those tests? i assume you used DST mode but how did you manage to use the steering axis for both torque input and output?
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 02, 2018, 04:34:31 PM
Post by: doubledragoncc on February 02, 2018, 04:34:31 PM
I seriously can not be bothered to get into this further.
If you cant read the words and think about what they mean I am not going to go in circles about it.
Sorry but I wrote it easy enough to understand so many times now it is getting tedious. I am just giving advice, nothing more but I hate having to type to start with and this subject is going in circles.
DD
If you cant read the words and think about what they mean I am not going to go in circles about it.
Sorry but I wrote it easy enough to understand so many times now it is getting tedious. I am just giving advice, nothing more but I hate having to type to start with and this subject is going in circles.
DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 13, 2018, 06:31:52 PM
Post by: speedfr on February 13, 2018, 06:31:52 PM
Messieurs, please remain calm !!!
And PEACE !
It's a game....
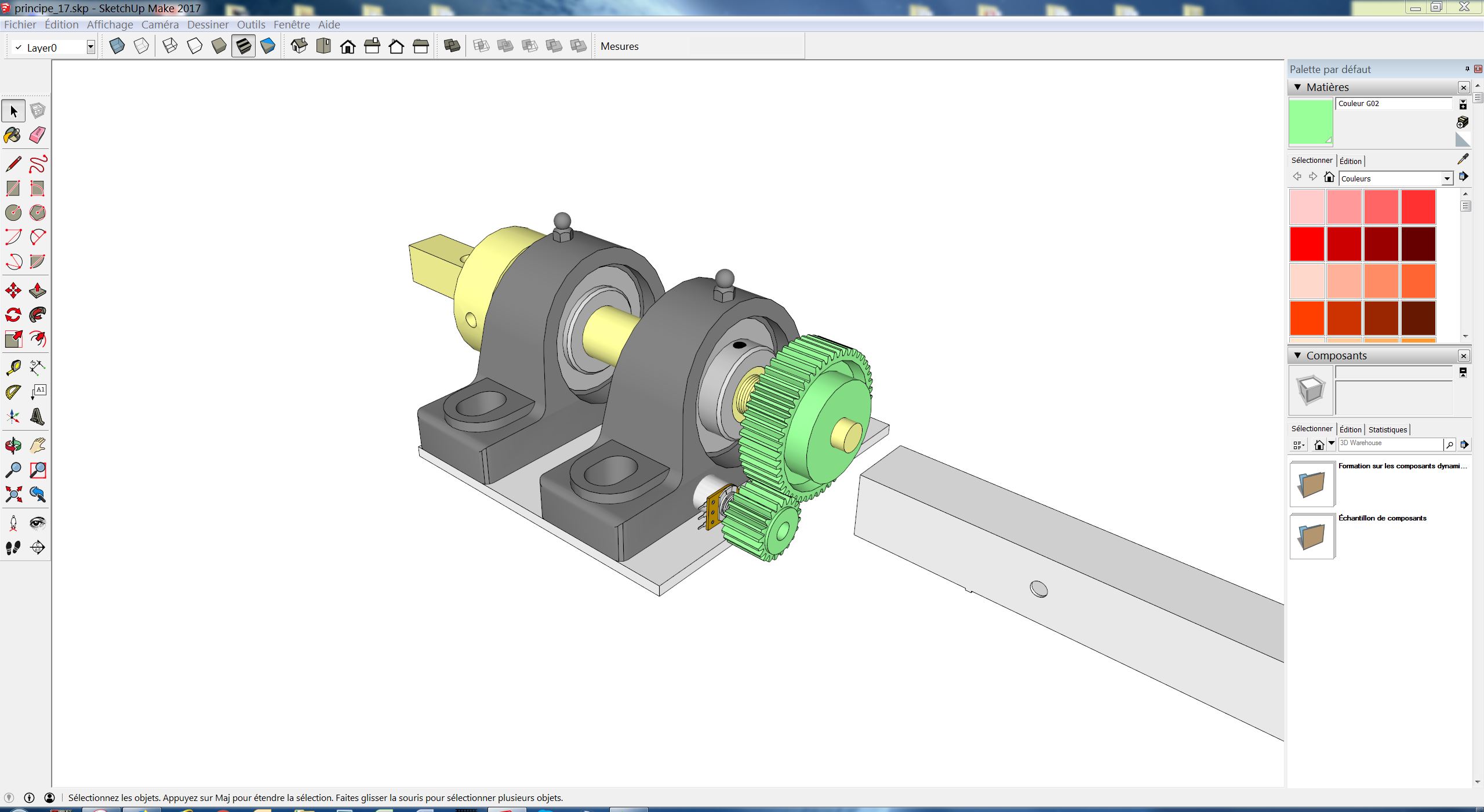
So here are the news, i don't have the technical words but anyway, a picture is better than any words :
Next step is welding and electronics.
Then the feet part.

Here is the princip :
And PEACE !
It's a game....
So here are the news, i don't have the technical words but anyway, a picture is better than any words :
Next step is welding and electronics.
Then the feet part.
Here is the princip :
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 14, 2018, 08:14:11 AM
Post by: doubledragoncc on February 14, 2018, 08:14:11 AM
Brilliant work speedy ;D
I wish I could do such good 3D design work. Your system is going to rock.
You should do some tests with the Bodnar board to work out polling for axis on it as clutch is reversed and depending on you steering direction it may be too.
Best of luck and hope to chat soon
DD
I wish I could do such good 3D design work. Your system is going to rock.
You should do some tests with the Bodnar board to work out polling for axis on it as clutch is reversed and depending on you steering direction it may be too.
Best of luck and hope to chat soon
DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 14, 2018, 08:34:57 PM
Post by: speedfr on February 14, 2018, 08:34:57 PM
Thanks DD ;D
About Eletronics, that will be the last phase, once all the mechanical stuff are on the good places, then i'll take care of cables and potentiometers.
Here is what it should look with your MTE Base plate.
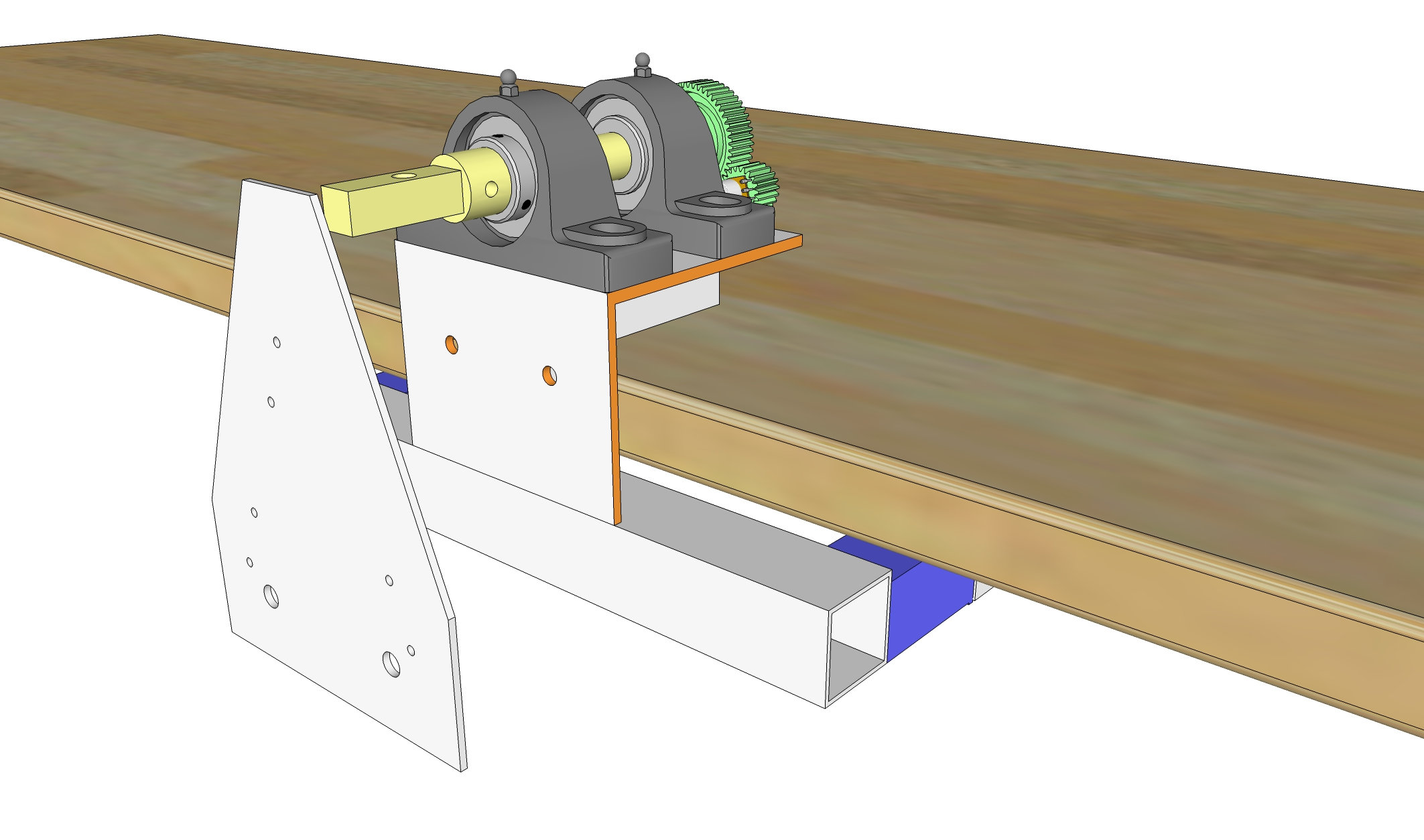
And the actual system as far as it is :
Still waiting for the second "manomètre" for my Acetylène bootle, the one on the exit that goes from 0 to 2.5bar and regulate the gaz... It's been 1 week and a half that it still not there....
About Eletronics, that will be the last phase, once all the mechanical stuff are on the good places, then i'll take care of cables and potentiometers.
Here is what it should look with your MTE Base plate.
And the actual system as far as it is :
Still waiting for the second "manomètre" for my Acetylène bootle, the one on the exit that goes from 0 to 2.5bar and regulate the gaz... It's been 1 week and a half that it still not there....
Title: Re: Project Realistic Rig
Post by: speedfr on February 16, 2018, 08:02:33 PM
Post by: speedfr on February 16, 2018, 08:02:33 PM
Hello everybody !
I have to check some things with my parents, because i think i'm Chinese !! It's Christmas !!!
(handlebar is 640mm wide - streetbike one). And i have the plate to support the main axis. And the manometers finally, so this week end is welding time !!
See you soon and a little later on the track i hope one day ! ;D

I have to check some things with my parents, because i think i'm Chinese !! It's Christmas !!!
(handlebar is 640mm wide - streetbike one). And i have the plate to support the main axis. And the manometers finally, so this week end is welding time !!
See you soon and a little later on the track i hope one day ! ;D
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 16, 2018, 09:54:13 PM
Post by: doubledragoncc on February 16, 2018, 09:54:13 PM
Hi Speedy
I think you may find the bars will be a problem with the risers and lining up to the MTE correctly. That is why I said to use the drag bars.
Chat soon and have fun
DD
I think you may find the bars will be a problem with the risers and lining up to the MTE correctly. That is why I said to use the drag bars.
Chat soon and have fun
DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 16, 2018, 10:31:59 PM
Post by: speedfr on February 16, 2018, 10:31:59 PM
Hello DD ;)
What is the "drag bar" ? i don't get it.
But yes, the cables are going to be short and not align but i don't think that will be an issue.
here first mount. This one cost nothing and was fine to give a try.
I've seen another one, 750mm (so i'll have to cut it a bit) for 11€ and it's "flat". Maybe i'll try that.
And anyway, nothing's lost, it goes perfectly on the pitbike Scud 200 that my sons plays with. ;D
We'll see.

Or... i could do as a earlier study about it (i don't know if you remenber) and make another Base Plate and put the MTE in front ... and still use the black ones you sent me :o
What is the "drag bar" ? i don't get it.
But yes, the cables are going to be short and not align but i don't think that will be an issue.
here first mount. This one cost nothing and was fine to give a try.
I've seen another one, 750mm (so i'll have to cut it a bit) for 11€ and it's "flat". Maybe i'll try that.
And anyway, nothing's lost, it goes perfectly on the pitbike Scud 200 that my sons plays with. ;D
We'll see.
Or... i could do as a earlier study about it (i don't know if you remenber) and make another Base Plate and put the MTE in front ... and still use the black ones you sent me :o
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 17, 2018, 07:16:04 AM
Post by: doubledragoncc on February 17, 2018, 07:16:04 AM
These are the ones I use and cut them down to 650mm

Is standard "Dragbars" 22mm
https://www.ebay.co.uk/itm/301071174251 (https://www.ebay.co.uk/itm/301071174251)
DD
Is standard "Dragbars" 22mm
https://www.ebay.co.uk/itm/301071174251 (https://www.ebay.co.uk/itm/301071174251)
DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 17, 2018, 01:10:12 PM
Post by: speedfr on February 17, 2018, 01:10:12 PM
Ok, it's the other one i've seen that was in the store.
I'll go for that on tuesday.
Thank you DD.
I'll go for that on tuesday.
Thank you DD.
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 18, 2018, 10:18:34 AM
Post by: doubledragoncc on February 18, 2018, 10:18:34 AM
I cut 50mm off each end so that the cables all line up to the MTEs.
DD
DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 18, 2018, 06:36:48 PM
Post by: speedfr on February 18, 2018, 06:36:48 PM
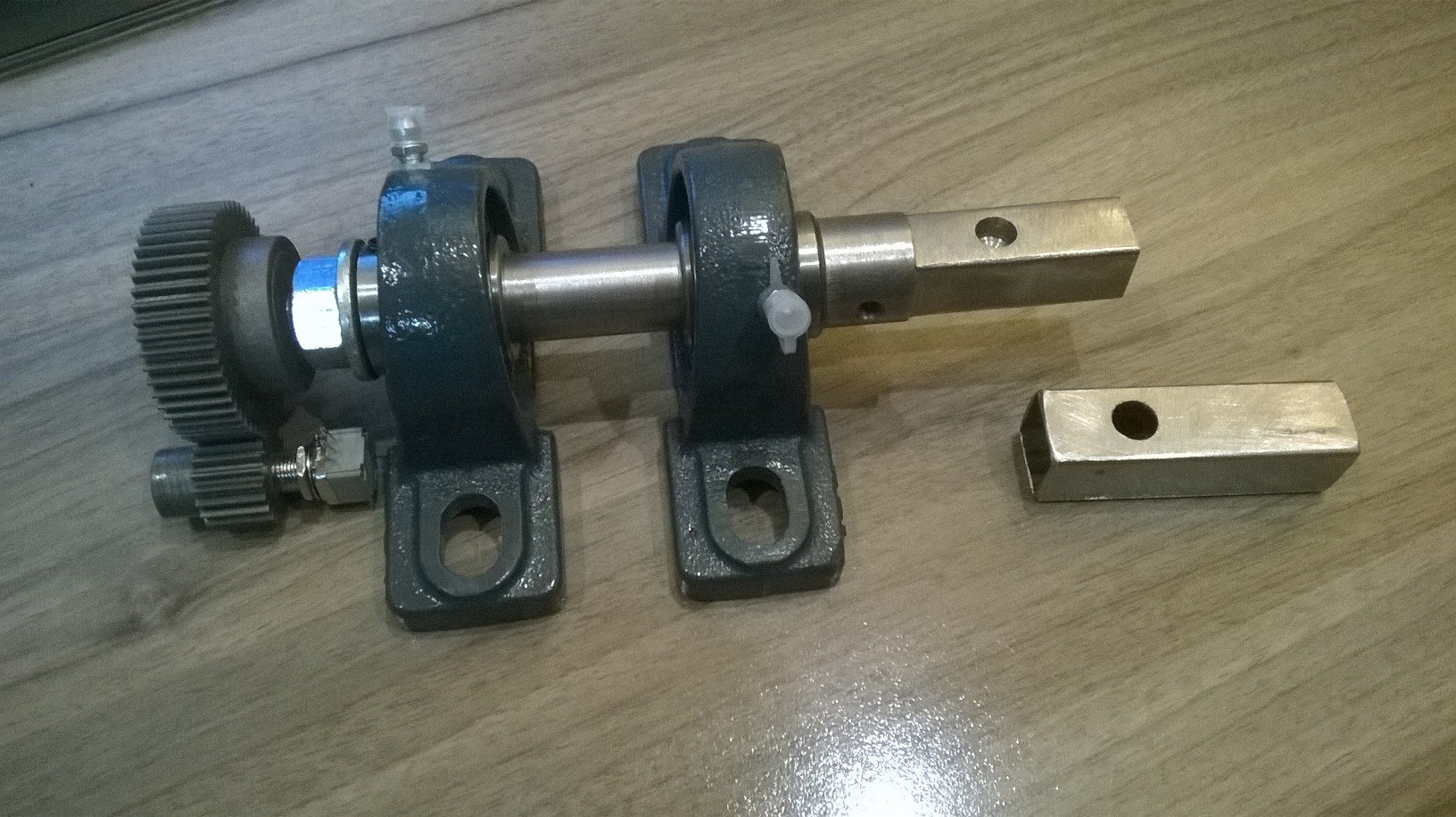
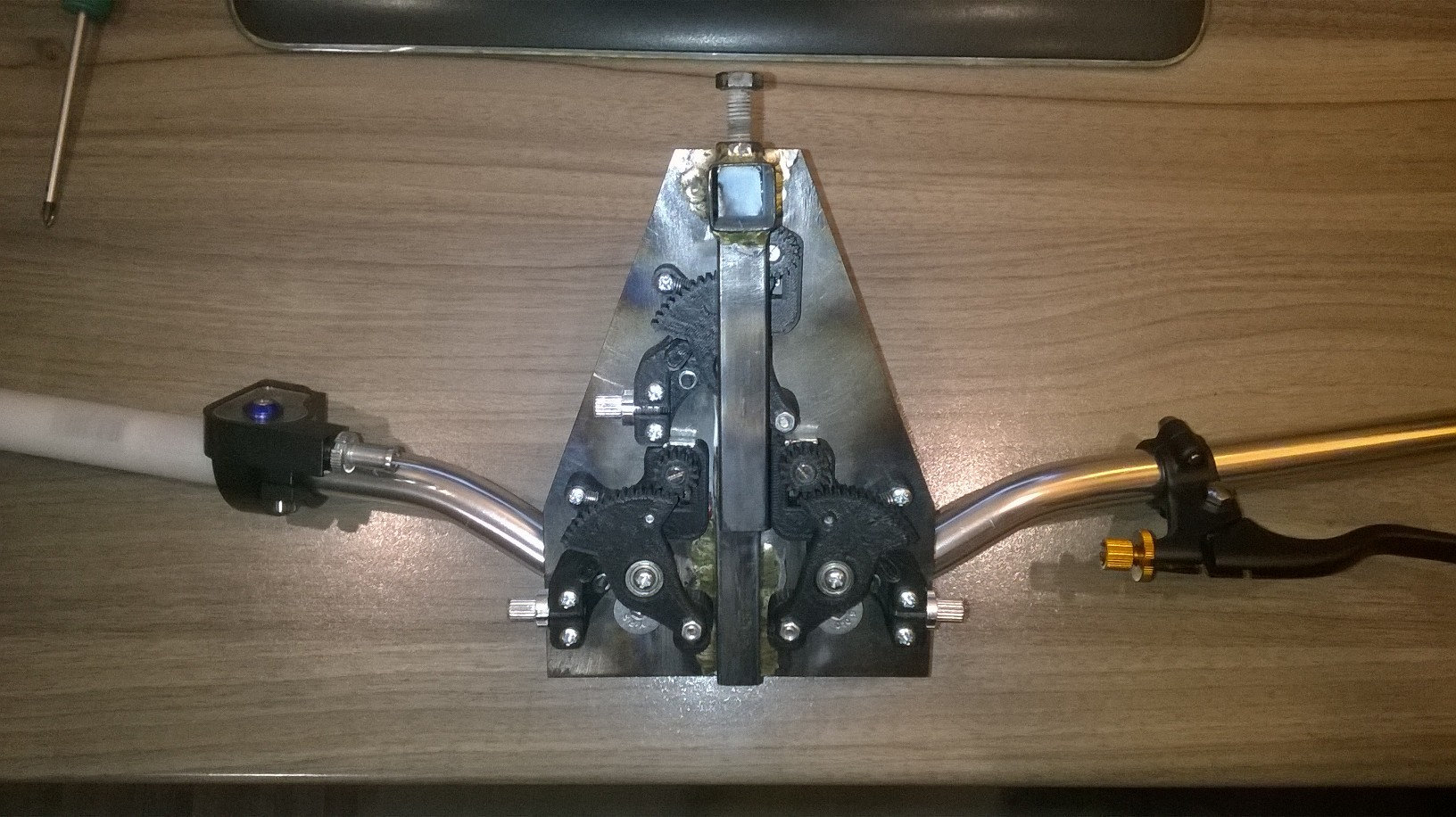
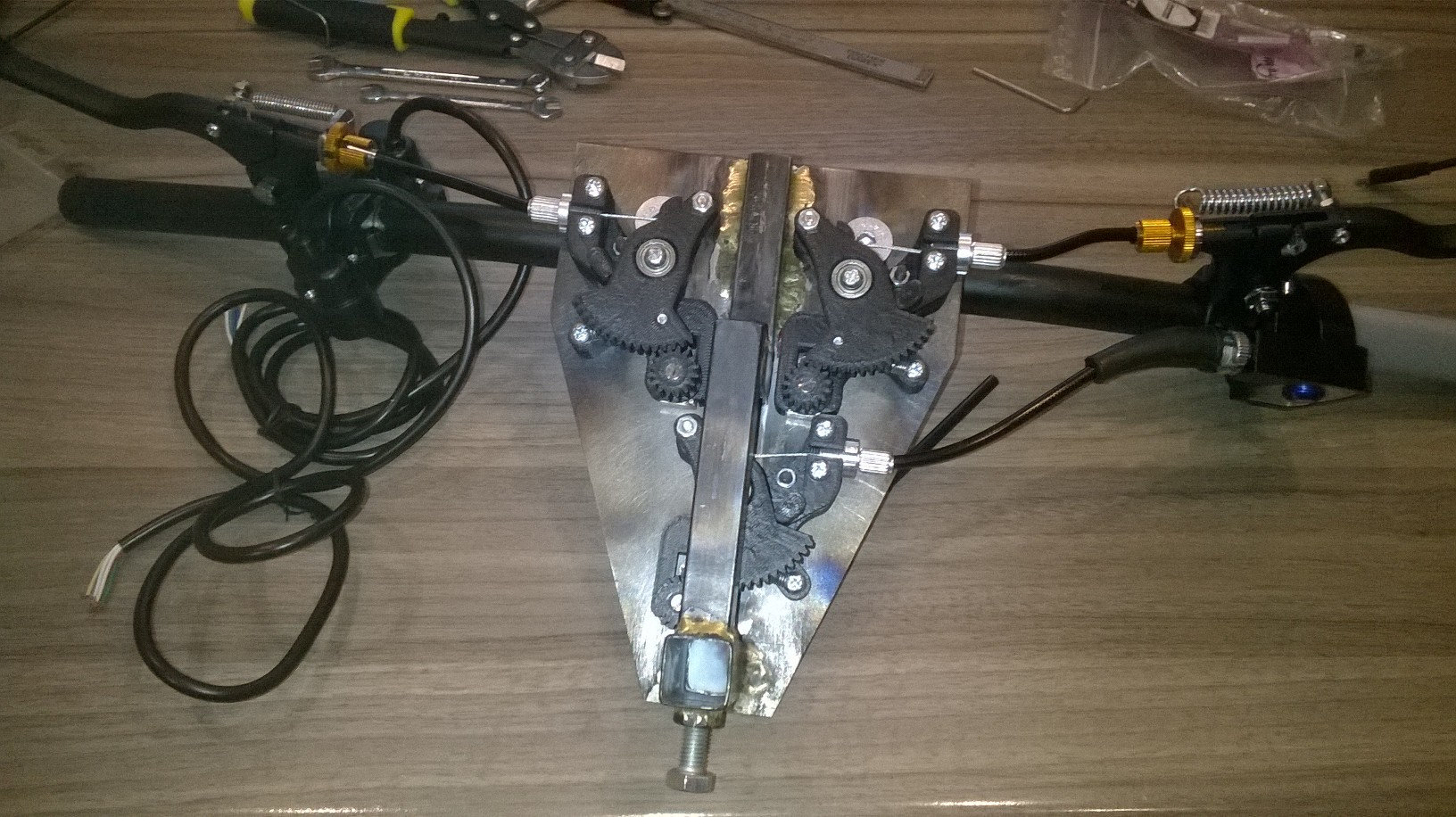
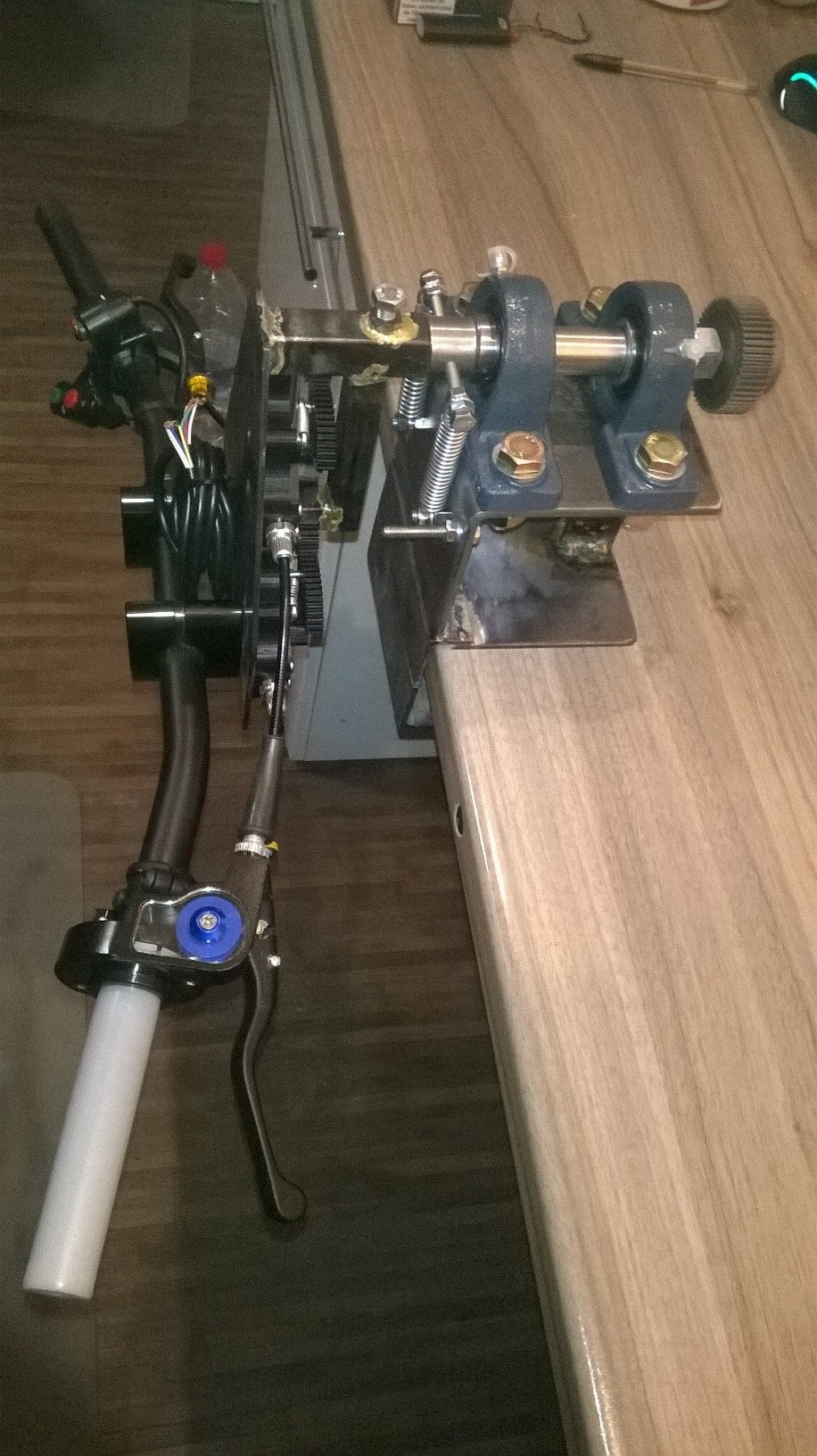
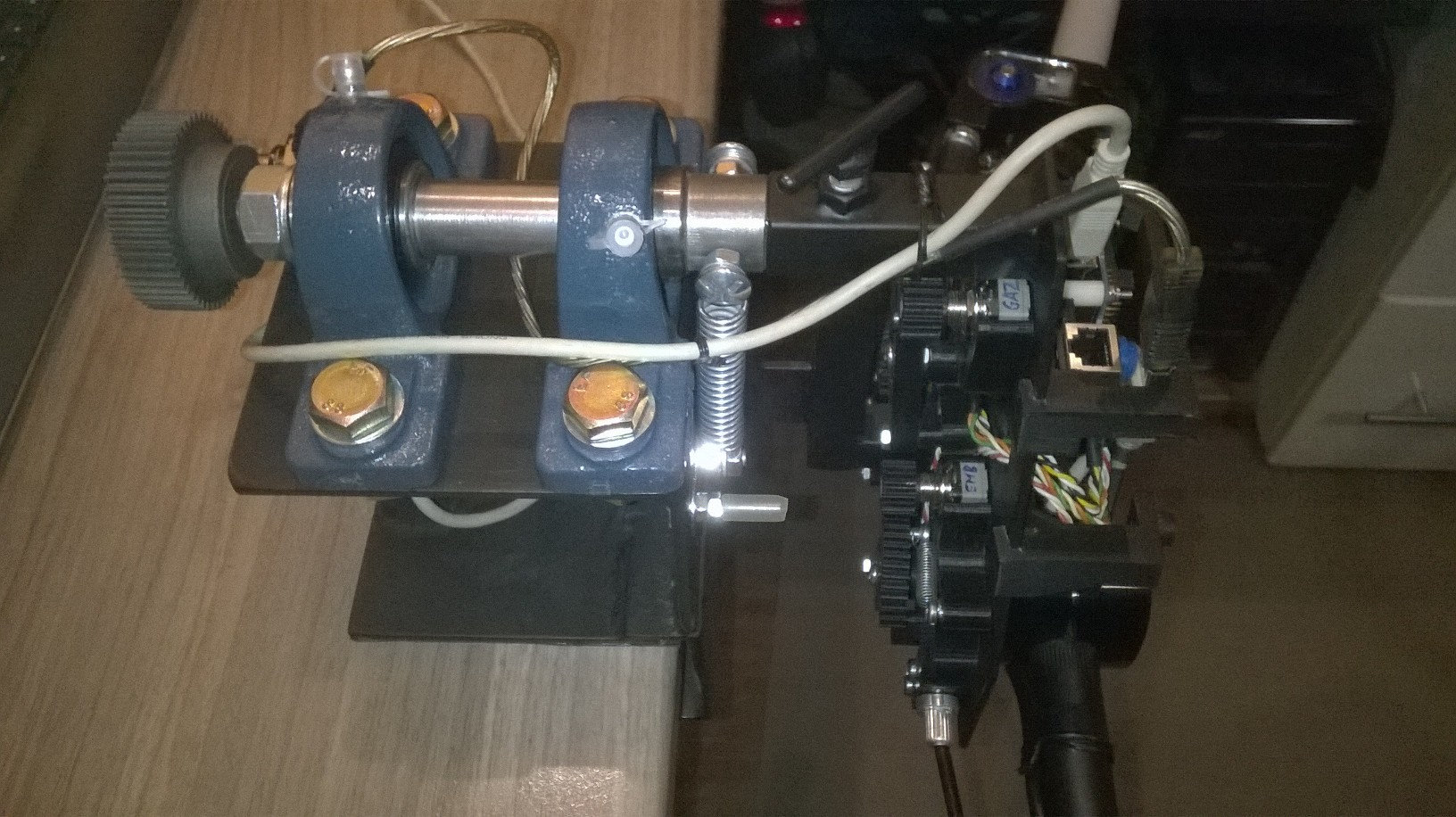
Ok, here a few picts of my new Iron ( ;D) after welding and mounting the MTE for a try.
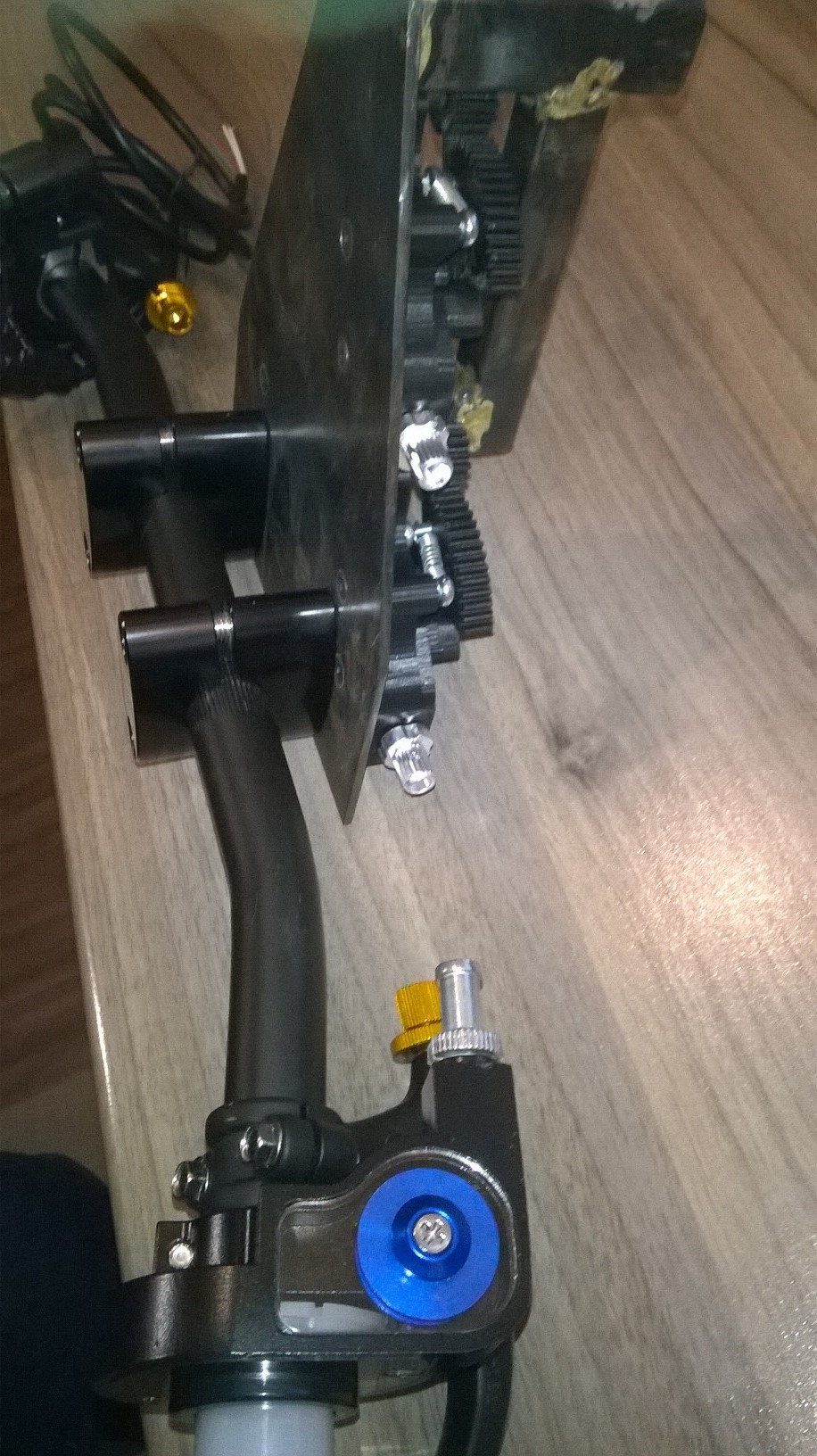
Then some side picts to appreciate the way the cables route.
Welding the steering head today, but might not have enough Oxygene to finish. :P



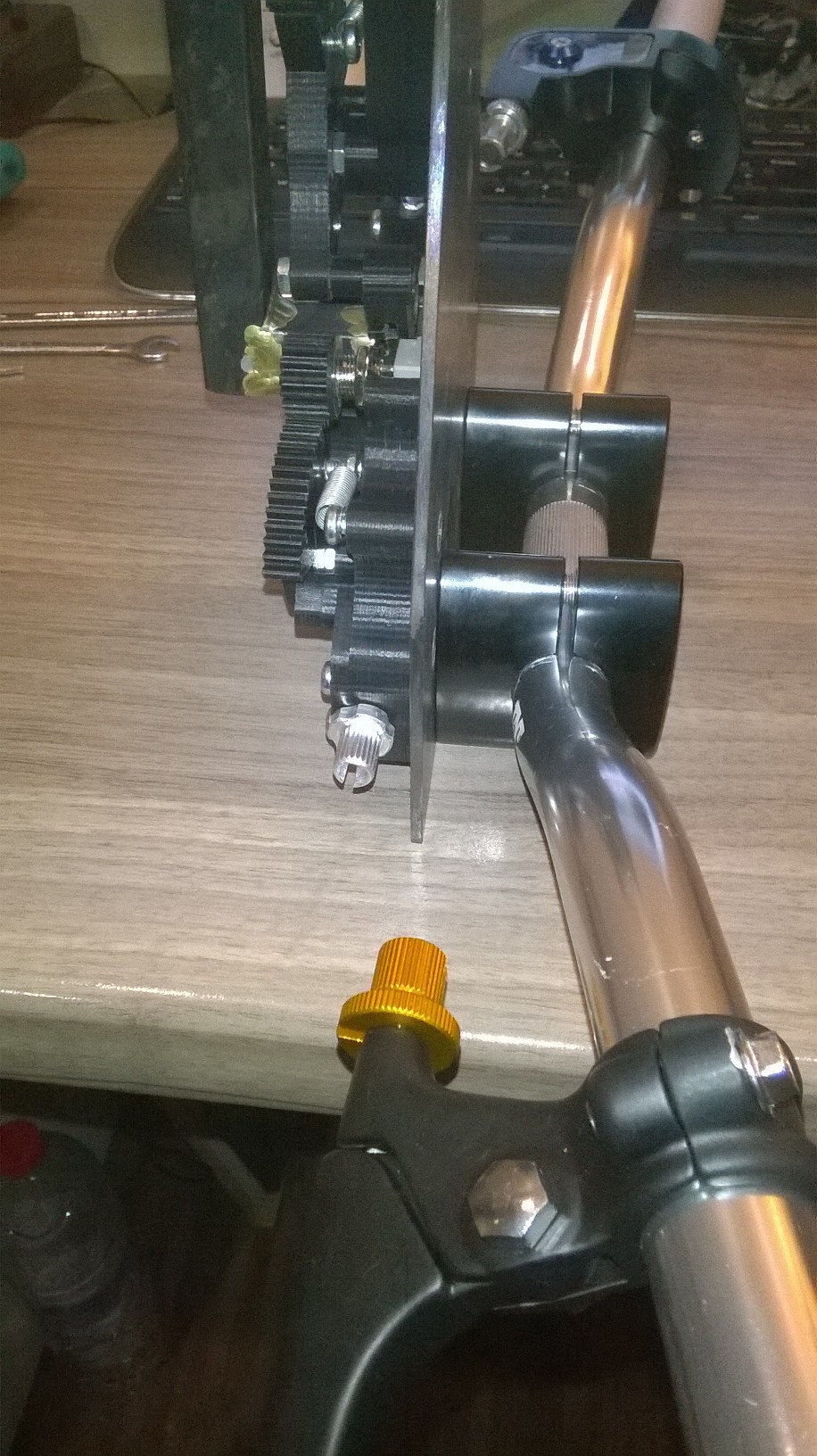
Then some side picts to appreciate the way the cables route.
Welding the steering head today, but might not have enough Oxygene to finish. :P
Title: Re: Project Realistic Rig
Post by: Napalm Nick on February 18, 2018, 10:01:13 PM
Post by: Napalm Nick on February 18, 2018, 10:01:13 PM
Great job so far! 8)
Title: Re: Project Realistic Rig
Post by: speedfr on February 18, 2018, 10:39:05 PM
Post by: speedfr on February 18, 2018, 10:39:05 PM
Quote from: Napalm Nick on February 18, 2018, 10:01:13 PM
Great job so far! 8)
Thank you Nap-Nick ;)
Title: Re: Project Realistic Rig
Post by: KG_03 on February 19, 2018, 08:12:22 AM
Post by: KG_03 on February 19, 2018, 08:12:22 AM
Wow it looks amazing. Im really curious how it will work.
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 19, 2018, 09:27:51 AM
Post by: doubledragoncc on February 19, 2018, 09:27:51 AM
Great work speedy. Just remember the top MTE is for throttle. You should have a good clean S shape to the outer cable.
I use grub screws not bolts as it looks cleaner byw
Look forward to your tests
DD
I use grub screws not bolts as it looks cleaner byw
Look forward to your tests
DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 19, 2018, 06:41:26 PM
Post by: speedfr on February 19, 2018, 06:41:26 PM
Thanks guys :-[
Yes i've seen that the top MTE has a harder spring. ;)
And i should pick the handlebar on thursday when they receive my brakes pads for the Pan European.
And i ordered the rear brake and speed selector stuff from the German guys, should be there on thursday too.
I tried the Leo Bodnar, works fine and i even dl the little exe "BU0836 configuration".
Things are going fine but too slow obviously.
My goal is to have everything ready before the first race of WSBK. 8)
Yes i've seen that the top MTE has a harder spring. ;)
And i should pick the handlebar on thursday when they receive my brakes pads for the Pan European.
And i ordered the rear brake and speed selector stuff from the German guys, should be there on thursday too.
I tried the Leo Bodnar, works fine and i even dl the little exe "BU0836 configuration".
Things are going fine but too slow obviously.
My goal is to have everything ready before the first race of WSBK. 8)
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 19, 2018, 07:20:43 PM
Post by: doubledragoncc on February 19, 2018, 07:20:43 PM
Did I flash the board for you? It should say Hs3 Streetfighter PRO in windows configuration?
If not I will send you the file to flash it with the latest firmware too.
The configuration tool is not used for this board by the way, only the HID Flash tool
Let me know
DD
If not I will send you the file to flash it with the latest firmware too.
The configuration tool is not used for this board by the way, only the HID Flash tool
Let me know
DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 19, 2018, 07:58:44 PM
Post by: speedfr on February 19, 2018, 07:58:44 PM
It says "Game Controller HID" under Device Manager and "BU0836 Interface" under the Joystick/Printers config panel.
So, it's not flashed i guess but do i need it ? Tell me.
So, it's not flashed i guess but do i need it ? Tell me.
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 20, 2018, 07:32:29 AM
Post by: doubledragoncc on February 20, 2018, 07:32:29 AM
Leo Bodnar made firmware for me so I like to use it as is latest and works best I will email you when I get back from my meeting this morning.
DD
DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 20, 2018, 03:23:07 PM
Post by: speedfr on February 20, 2018, 03:23:07 PM
Oki doki Allan, i'll be looking for that stuff.
(tried to catch you on Skype yesterday, i'll retry tonoght but late, i've a big client to finish tonight so...probably 'round 10 PM so 9 PM your time... If you can... ;D )
(tried to catch you on Skype yesterday, i'll retry tonoght but late, i've a big client to finish tonight so...probably 'round 10 PM so 9 PM your time... If you can... ;D )
Title: Re: Project Realistic Rig
Post by: speedfr on February 22, 2018, 08:52:14 PM
Post by: speedfr on February 22, 2018, 08:52:14 PM
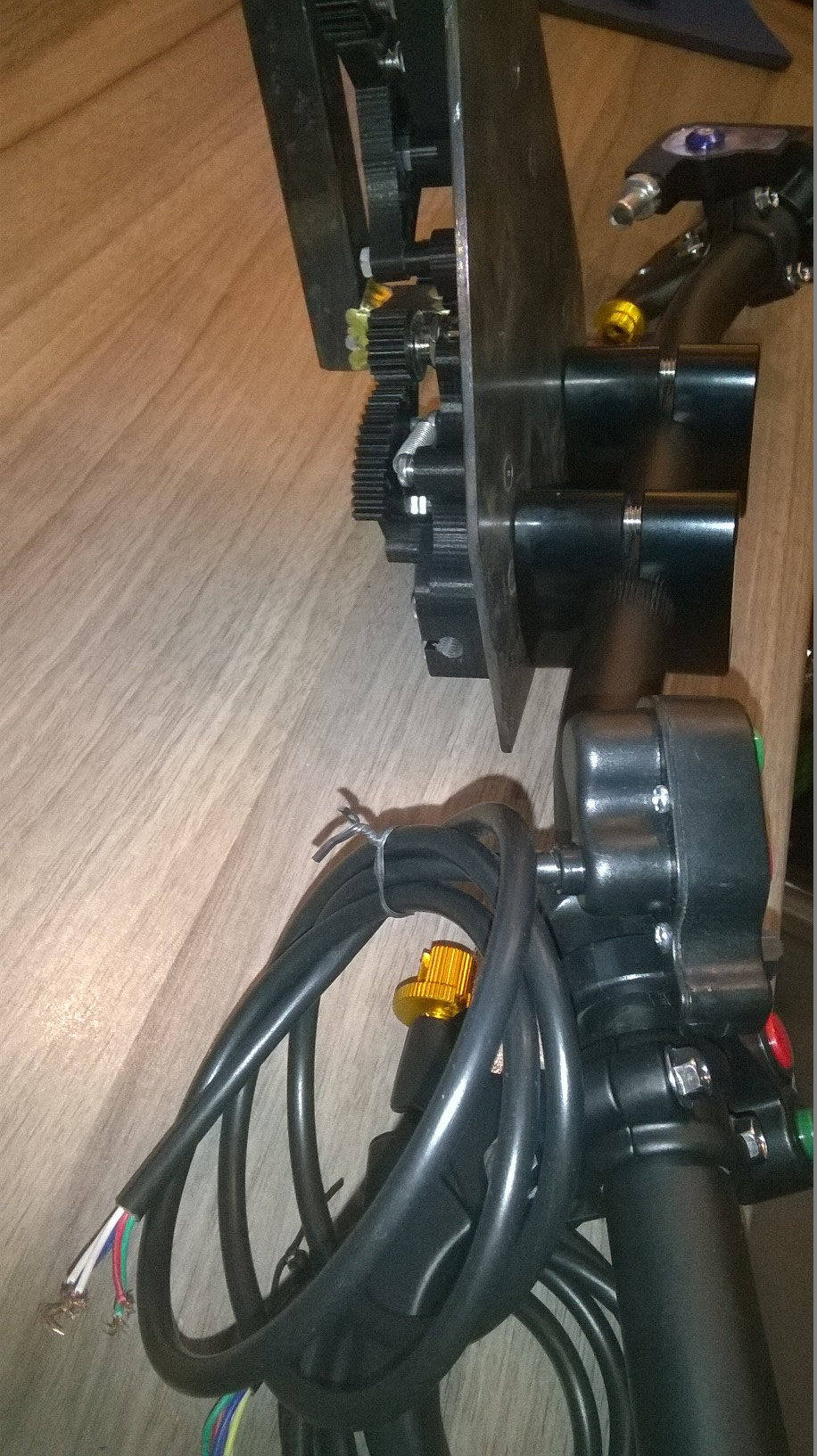
Little update with the new handlebar and the mad comodo on the left.
Now heading to the cables system to finish and then two more steps, the support attached to the table in front of my screen and second is the feet stuff, the rearset (who should arrive tomorrow).
Last thing will be about cabling and electronics part.
@DD : i haven't flash anything yet, i'll do it, just need to sneak into Leo Bodnar to learn how not to make a mistake and brick my BU0836.

Now heading to the cables system to finish and then two more steps, the support attached to the table in front of my screen and second is the feet stuff, the rearset (who should arrive tomorrow).
Last thing will be about cabling and electronics part.
@DD : i haven't flash anything yet, i'll do it, just need to sneak into Leo Bodnar to learn how not to make a mistake and brick my BU0836.
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 22, 2018, 09:23:16 PM
Post by: doubledragoncc on February 22, 2018, 09:23:16 PM
flashing the BU is real easy just make sure you remember where the file is in the folder I sent you
I can walk you through it if you want
DD
Edit: I alway remove the lock on the RED button so it is momentary and not push on push off. PLus put the clutch AFTER the button units so they are closer to the grip or you will have to stretch to reach them when riding.
I can walk you through it if you want
DD
Edit: I alway remove the lock on the RED button so it is momentary and not push on push off. PLus put the clutch AFTER the button units so they are closer to the grip or you will have to stretch to reach them when riding.
Title: Re: Project Realistic Rig
Post by: speedfr on February 22, 2018, 10:03:46 PM
Post by: speedfr on February 22, 2018, 10:03:46 PM
Ok for the flashing, i'll do that and concentrate on it when time will come.
About the button before the clutch, smart idea, i found that a little bit away but that should solve that sensatons. Anyway, nothing is definitif on this side so far, only once i have the steering head attached to the desk, then i'll know whare to put my hands and finger, then i'll fix everything.
And the lock about the red button is done already, i opened it yesterday night. ;)
About the button before the clutch, smart idea, i found that a little bit away but that should solve that sensatons. Anyway, nothing is definitif on this side so far, only once i have the steering head attached to the desk, then i'll know whare to put my hands and finger, then i'll fix everything.
And the lock about the red button is done already, i opened it yesterday night. ;)
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 22, 2018, 10:26:05 PM
Post by: doubledragoncc on February 22, 2018, 10:26:05 PM
If you find the red buttons are very easy to touch you should lengthen the spring in them a few mm it makes them better
DD
DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 23, 2018, 12:57:58 PM
Post by: speedfr on February 23, 2018, 12:57:58 PM
;D ;D ;D

Title: Re: Project Realistic Rig
Post by: speedfr on February 28, 2018, 04:44:35 PM
Post by: speedfr on February 28, 2018, 04:44:35 PM
Just a little update about cabling the levers and the gaz.
I have to say again that DD'work on 3D printing is a hell of a job, this things are perfect, and i adjusted them so the slightest movement on the levers or the gaz makes them follow exactly.
Perfect again !!
Now i have to finish my steerhaed fixing on the table (a few improvment to make) and i'm ready to attack the rearset then electronics ;D
I just need my 3D printer to be ready (probably at the end of the week) cuz i stopped using it being in the same place, ABS is toxic... I designed a special shelve where the printer gonna be inside and with a tuvbe that goes to the air sucking system (VMC in french). So i guess by this week end the box will be finish (coffin ? ) and i can print the 2 parts that i miss plus the system to catch the rear brake movement.
Almost there. :P
@DD
2 things :
1. for William' handelbar, i'm gonna need the little metallic parts that were laser cut (so next time you order some, please add 2 for me and tell me how much) plus i will ask for a Leo Bodnar complete stuff as well. That will be when i attack his rig. Not for the next month anyway (money side ;D)
2. I change the clutch spring for a easier one. Seems more "normal" like that.
I have to say again that DD'work on 3D printing is a hell of a job, this things are perfect, and i adjusted them so the slightest movement on the levers or the gaz makes them follow exactly.
Perfect again !!
Now i have to finish my steerhaed fixing on the table (a few improvment to make) and i'm ready to attack the rearset then electronics ;D
I just need my 3D printer to be ready (probably at the end of the week) cuz i stopped using it being in the same place, ABS is toxic... I designed a special shelve where the printer gonna be inside and with a tuvbe that goes to the air sucking system (VMC in french). So i guess by this week end the box will be finish (coffin ? ) and i can print the 2 parts that i miss plus the system to catch the rear brake movement.
Almost there. :P
@DD
2 things :
1. for William' handelbar, i'm gonna need the little metallic parts that were laser cut (so next time you order some, please add 2 for me and tell me how much) plus i will ask for a Leo Bodnar complete stuff as well. That will be when i attack his rig. Not for the next month anyway (money side ;D)
2. I change the clutch spring for a easier one. Seems more "normal" like that.
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 28, 2018, 04:54:38 PM
Post by: doubledragoncc on February 28, 2018, 04:54:38 PM
Do you mean the parts for the clutch and brake lever springs that goes on the cable adjuster?
If you suck air from the printer it can cause yoou to also suck away the heat that ABS MUST have!!!
DD
If you suck air from the printer it can cause yoou to also suck away the heat that ABS MUST have!!!
DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 28, 2018, 05:11:42 PM
Post by: speedfr on February 28, 2018, 05:11:42 PM
So :
1. Yes the little metallic part that goes at the end of the lever and hold the spring. This parts are super well made and i don't think i could reproduce that.
2. The air inside the box is going to be suck by the air system (like in a bathroom) but at the same time, i did a few hole under the box to let fresh air going in and evelopping the printer on a side, then stealing the ABS fumes and a little bit of heat from the printer (bed is at 110°C - maybe less if i'm in a closed box).
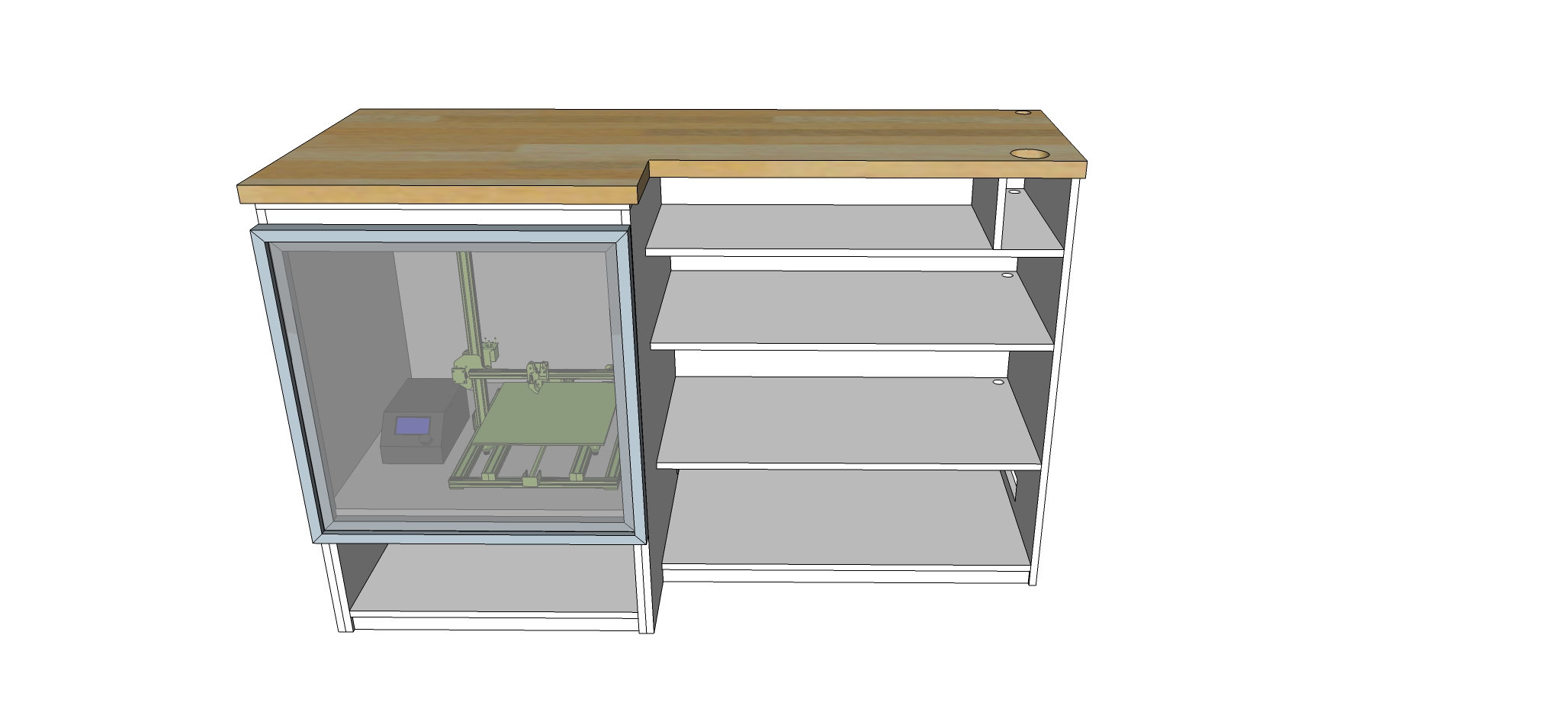
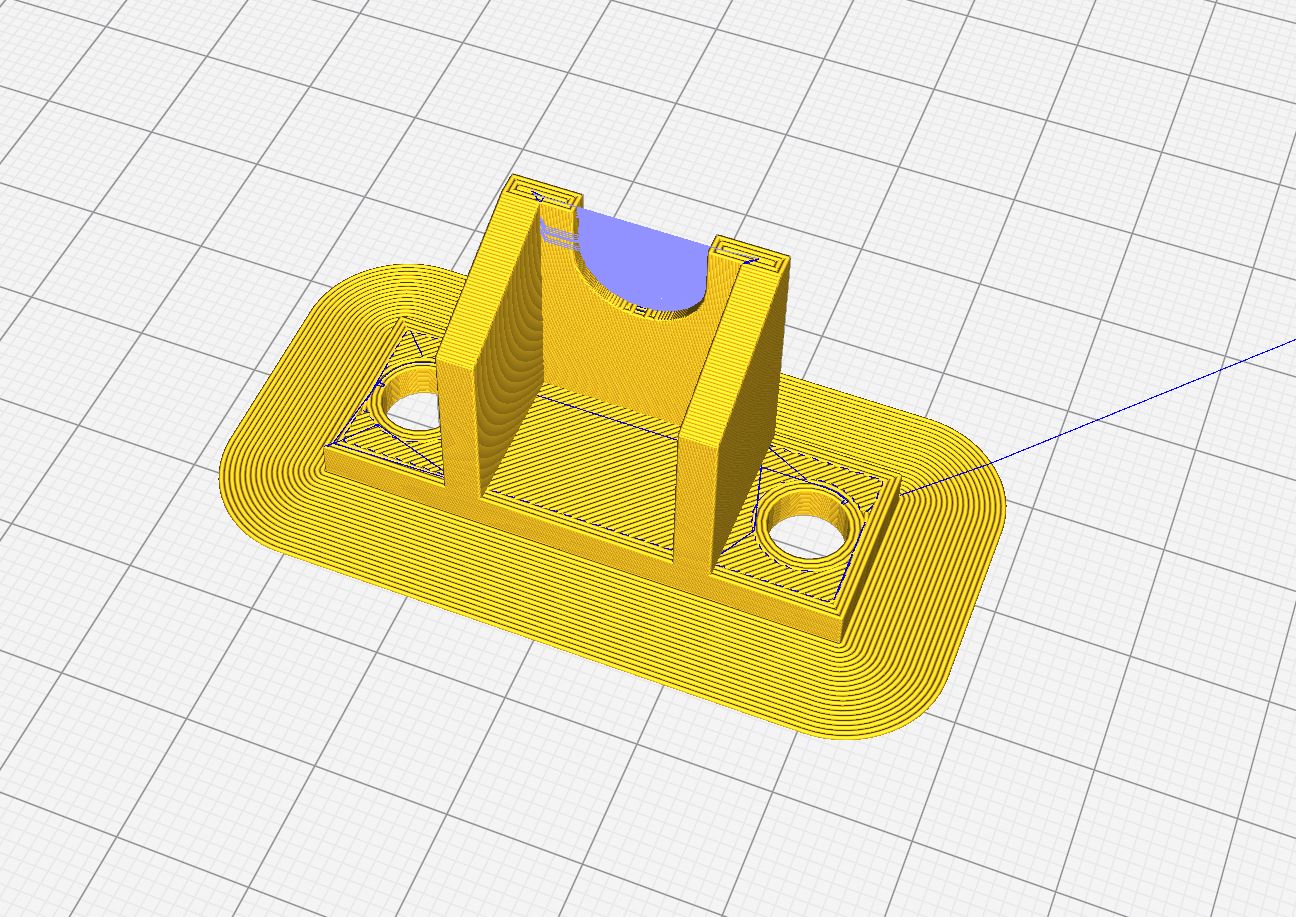
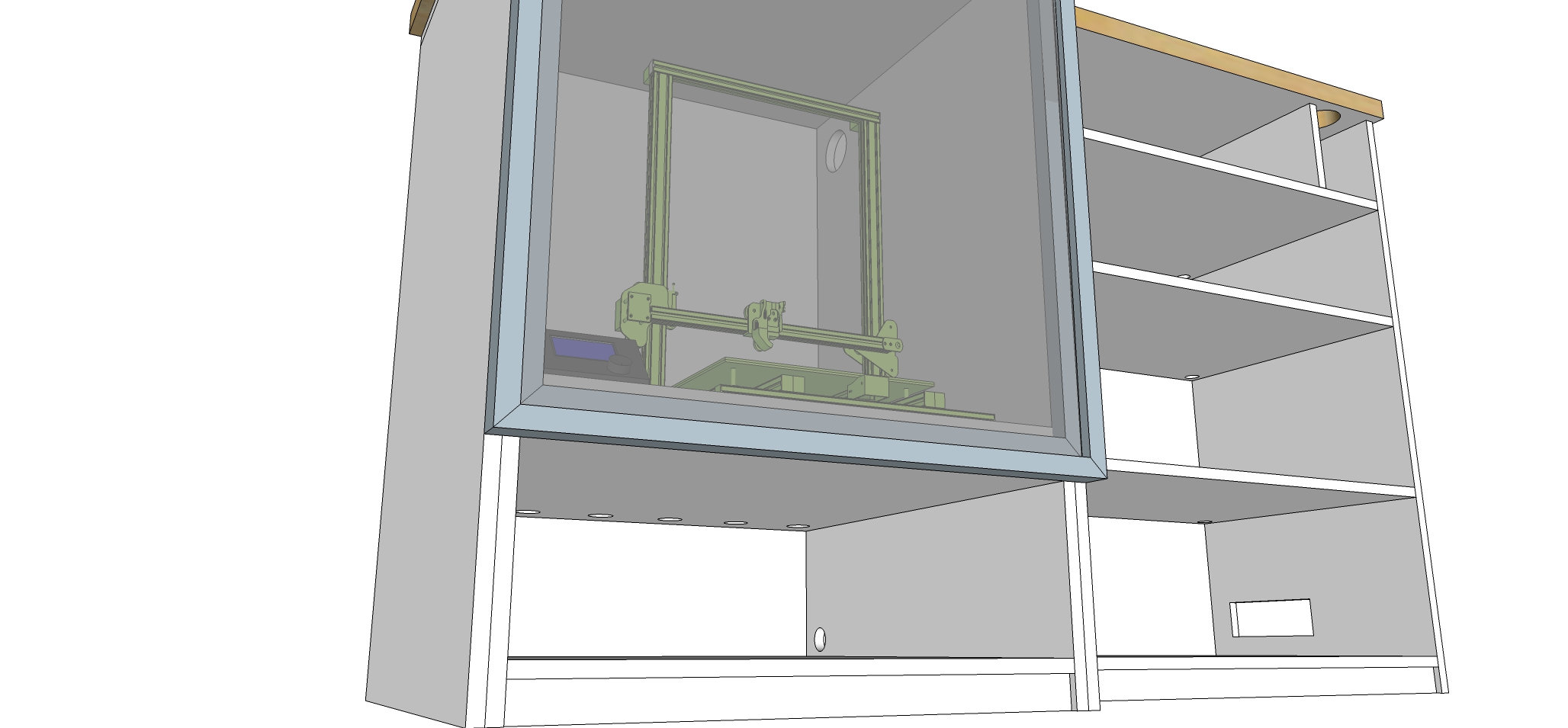
Here is the plan of the box i'm making (wood is cut, and everything is ready to assembly for this week-end (2 friends that are Carpenters) so sunday night i should be able to print this little part i need at first (steering angle)).
(that's for all that and other things that i try to catch you yesterday but you'd rather be with girls...pfffff ;D ;D (Teasing))
The box (linked to the exhaust by the Ø80mm on the right side)
The little part in red
Cura ready to go !
View of the holes in the box, a few under and the Ø80 on the top right that goes to the exit on top right of the entire shelve
1. Yes the little metallic part that goes at the end of the lever and hold the spring. This parts are super well made and i don't think i could reproduce that.
2. The air inside the box is going to be suck by the air system (like in a bathroom) but at the same time, i did a few hole under the box to let fresh air going in and evelopping the printer on a side, then stealing the ABS fumes and a little bit of heat from the printer (bed is at 110°C - maybe less if i'm in a closed box).
Here is the plan of the box i'm making (wood is cut, and everything is ready to assembly for this week-end (2 friends that are Carpenters) so sunday night i should be able to print this little part i need at first (steering angle)).
(that's for all that and other things that i try to catch you yesterday but you'd rather be with girls...pfffff ;D ;D (Teasing))
The box (linked to the exhaust by the Ø80mm on the right side)
The little part in red
Cura ready to go !
View of the holes in the box, a few under and the Ø80 on the top right that goes to the exit on top right of the entire shelve
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 28, 2018, 07:17:14 PM
Post by: doubledragoncc on February 28, 2018, 07:17:14 PM
ABS is best when nozzel is 230 and bed no less than 110. If you creat any kind of airflow you will get problems with prints lifting. Use a glass plate on the bed and TRESemme Salon Finish hairspray to stop prints lifting. Wipe the surface 3 times with a dish sponge soaked in water after squeezing most of the water out. This is the best way to keep the bed good.
I have 2 spare spring plates I can send you.
DD
I have 2 spare spring plates I can send you.
DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 28, 2018, 07:25:29 PM
Post by: speedfr on February 28, 2018, 07:25:29 PM
DD, hold these two parts on the side or just add 2 on the next order if you have to use them.
About printing, i did several pieces two weeks ago, my noze is finally at 245°C and the bed is better at 105°C
I don't use hair spray or anything, the bed is made in a special cover (same as Anycubic) and is perfect.
I did 3 parts 22cm long and no lifting or wrapping or anything. Just perfect. In a 19°C-20°C room.
Don't worry for that, i've been doing a lot of improvment and experience the retractation already, i know what to do.
The air is going to go around a volume that include the printer, not directly around the bed.
And anyway, from what i've seen, when you put the printer into a closed box, you usually can take the temp down a bit.
In the future, the idea is to go to HT-PLA that is 3 time cheaper, no toxic and that you can make as hard as ABS by putting it 10mn at 100°c in your stove.
i gave you link about it on Skype but here :
https://www.flashforge-eu.com/add3d-ht-pla-green-filament-1-75-mm
I'm waiting for it to be spread worldwide and go to that instead of ABS or Nylon. (which are the best for mechanics so far). And using less power for the bed and the noze. ;)
About printing, i did several pieces two weeks ago, my noze is finally at 245°C and the bed is better at 105°C
I don't use hair spray or anything, the bed is made in a special cover (same as Anycubic) and is perfect.
I did 3 parts 22cm long and no lifting or wrapping or anything. Just perfect. In a 19°C-20°C room.
Don't worry for that, i've been doing a lot of improvment and experience the retractation already, i know what to do.
The air is going to go around a volume that include the printer, not directly around the bed.
And anyway, from what i've seen, when you put the printer into a closed box, you usually can take the temp down a bit.
In the future, the idea is to go to HT-PLA that is 3 time cheaper, no toxic and that you can make as hard as ABS by putting it 10mn at 100°c in your stove.
i gave you link about it on Skype but here :
https://www.flashforge-eu.com/add3d-ht-pla-green-filament-1-75-mm
I'm waiting for it to be spread worldwide and go to that instead of ABS or Nylon. (which are the best for mechanics so far). And using less power for the bed and the noze. ;)
Title: Re: Project Realistic Rig
Post by: KG_03 on February 28, 2018, 10:13:28 PM
Post by: KG_03 on February 28, 2018, 10:13:28 PM
My brain is to small to gather all the informations given here...anyway I must say it looks amazing :-O fantastic work :-D
Title: Re: Project Realistic Rig
Post by: doubledragoncc on February 28, 2018, 10:35:36 PM
Post by: doubledragoncc on February 28, 2018, 10:35:36 PM
Ok will hold onto them for you.
I prefer ABS and just dont worry about fumes lol. It is better for gears too. PLA is too hard and has no flex which is good to protect parts from being brittle and braking easy. Good to hear you got your temps sorted though.
DD
I prefer ABS and just dont worry about fumes lol. It is better for gears too. PLA is too hard and has no flex which is good to protect parts from being brittle and braking easy. Good to hear you got your temps sorted though.
DD
Title: Re: Project Realistic Rig
Post by: speedfr on February 28, 2018, 11:10:06 PM
Post by: speedfr on February 28, 2018, 11:10:06 PM
Thanks KG but nothing exceptional, just a lot of passion and determination ;)
And thank you DD for keeping those aside for me.
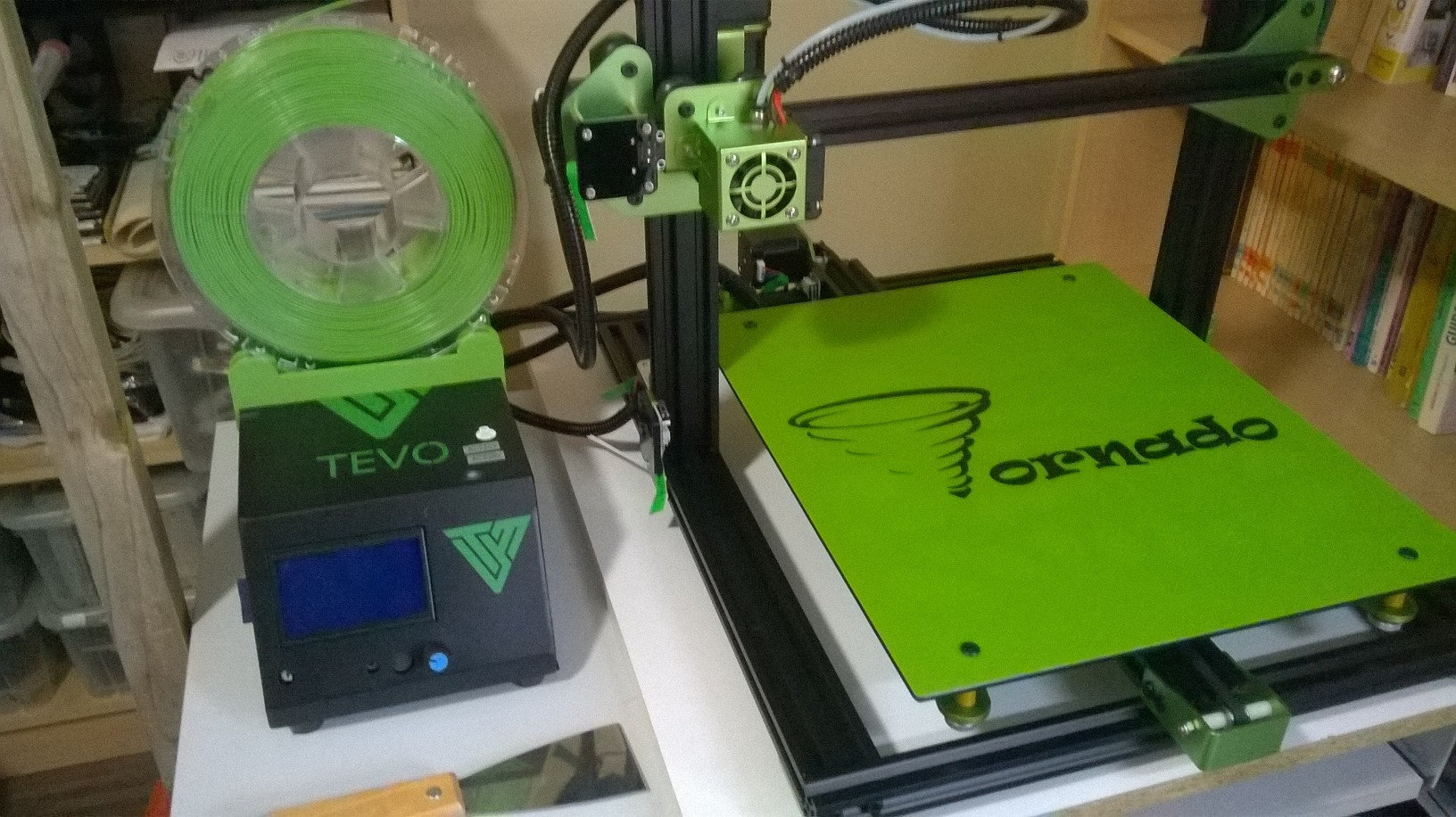
For the 3D printer, took me a few error to find out, and then i did 3 parts like this (the fourth one was done alone and i decided to do 3 at the time... 7h37 of printing).
Quality is incredible, 40% filled in and just had to wait for the bed to be cold to retrieve the parts. (Spool Holder)
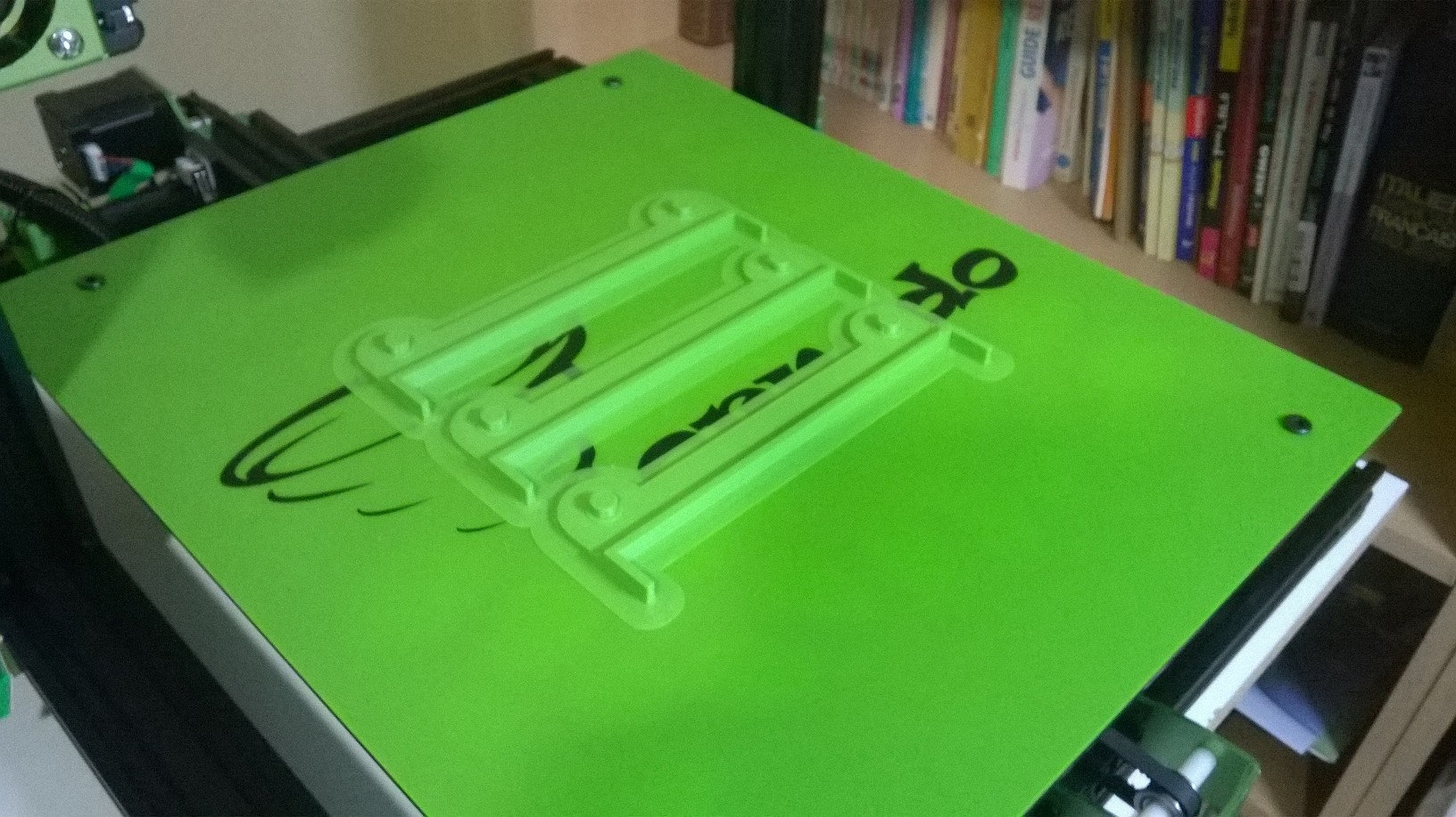
the spool holder done (include 4 skateboard bearings)
And thank you DD for keeping those aside for me.
For the 3D printer, took me a few error to find out, and then i did 3 parts like this (the fourth one was done alone and i decided to do 3 at the time... 7h37 of printing).
Quality is incredible, 40% filled in and just had to wait for the bed to be cold to retrieve the parts. (Spool Holder)
the spool holder done (include 4 skateboard bearings)
Title: Re: Project Realistic Rig
Post by: speedfr on February 28, 2018, 11:38:50 PM
Post by: speedfr on February 28, 2018, 11:38:50 PM
So for the top part, mechanical and handlebar links are done.
Not painted yet, i need to polish a little bit at first.
But it works ;D
Next is the rearset and the electonics but i need the 3D printer ready. >:(
The story continues... 8)

Not painted yet, i need to polish a little bit at first.
But it works ;D
Next is the rearset and the electonics but i need the 3D printer ready. >:(
The story continues... 8)
Title: Re: Project Realistic Rig
Post by: doubledragoncc on March 01, 2018, 12:28:25 PM
Post by: doubledragoncc on March 01, 2018, 12:28:25 PM
Great work speedy. I recommend you tilt the whole steering unit to 15 degrees (top away from you) for better feeling and more comfort on the wrists. Found it the best angle.
DD
DD
Title: Re: Project Realistic Rig
Post by: speedfr on March 01, 2018, 02:04:56 PM
Post by: speedfr on March 01, 2018, 02:04:56 PM
Quote from: doubledragoncc on March 01, 2018, 12:28:25 PM
Great work speedy. I recommend you tilt the whole steering unit to 15 degrees (top away from you) for better feeling and more comfort on the wrists. Found it the best angle.
DD
heu.... i whish you've said that BEFORE i weld and align everything (like on the plans i showed you) and kill my ass to make pieces at 90° perfect... Now the horizontal axis is flat, totally flat, and there's no way that i can give 15° angle on this one....
It's ok, i'll see when "riding" ???
And the Ø1.6mm springs for the front lever are too strong at start i think so i thought about a little modification in the system to have smooth at start and then increased strength to finish the braking movement.
With a Ø1.2mm traction spring and a compression spring as well. I'll do a little draw to explain what i have in mind. The idea is to reproduced (as close as possible) the effect of a hydraulic brake (smooth at first then hard at the end). Using the nice lever plates that you send me.
You'll find me on Skype tonight after my afternoon ride at clients (it's not snowing anymore).
Title: Re: Project Realistic Rig
Post by: doubledragoncc on March 01, 2018, 04:09:26 PM
Post by: doubledragoncc on March 01, 2018, 04:09:26 PM
Sorry you made it too quickly lol
You can make an adapter plate I am sure. Just triangular section under the bearings.
DD
You can make an adapter plate I am sure. Just triangular section under the bearings.
DD
Title: Re: Project Realistic Rig
Post by: speedfr on March 01, 2018, 06:43:34 PM
Post by: speedfr on March 01, 2018, 06:43:34 PM
Nope... now its welded, fixed and if i put a 10-11mm plate under the front bearing, the backs are not gonna be align and my steering limiters and the springs are gonna be off...
it's the entire steering head bloc that need to be turned to 15° angle...
it's the entire steering head bloc that need to be turned to 15° angle...
Title: Re: Project Realistic Rig
Post by: doubledragoncc on March 01, 2018, 07:26:35 PM
Post by: doubledragoncc on March 01, 2018, 07:26:35 PM
exactly, you would need to weld 2 plates at 15degrees onto existing plates so all moves together.
DD
DD
Title: Re: Project Realistic Rig
Post by: speedfr on March 01, 2018, 07:32:37 PM
Post by: speedfr on March 01, 2018, 07:32:37 PM
impossible.
i need to cut the bottom between the fixing on the table stuff and the steering head otherwise the limiters and the springs are away...
I won't do it as it took me a lot of work to do a perfect 90° angle before welding.
So, for the next one.
And on any of your plan this angle appears, not on your steering head, nothing.
But it's a lot of work to redo all of that so i pass. That pisses me off....
i need to cut the bottom between the fixing on the table stuff and the steering head otherwise the limiters and the springs are away...
I won't do it as it took me a lot of work to do a perfect 90° angle before welding.
So, for the next one.
And on any of your plan this angle appears, not on your steering head, nothing.
But it's a lot of work to redo all of that so i pass. That pisses me off....
Title: Re: Project Realistic Rig
Post by: doubledragoncc on March 01, 2018, 08:13:49 PM
Post by: doubledragoncc on March 01, 2018, 08:13:49 PM
It will still be fine at what you have. Dont be pissed off it can ruin a day lol
DD
DD
Title: Re: Project Realistic Rig
Post by: speedfr on March 01, 2018, 08:22:32 PM
Post by: speedfr on March 01, 2018, 08:22:32 PM
i'm sorry but i really don't think it's something funny or to lol about.
I struggle to finish that, and doing it the best i can so no, it doesn't make me laugh at all Allan.
And it ruins my night already when i read that it needs to be angled at 15°.
But never mind it's my problem. And i'll go away from here.
I struggle to finish that, and doing it the best i can so no, it doesn't make me laugh at all Allan.
And it ruins my night already when i read that it needs to be angled at 15°.
But never mind it's my problem. And i'll go away from here.
Title: Re: Project Realistic Rig
Post by: doubledragoncc on March 01, 2018, 08:34:11 PM
Post by: doubledragoncc on March 01, 2018, 08:34:11 PM
Speedy I was not laughing at you m8.
It does not have to be at 15degrees, it is what I like. It is minimal angle and you will not have any issue because of it that is why I say dont let it worry you. It really is such a small amount you might not even have noticed it.
DD
It does not have to be at 15degrees, it is what I like. It is minimal angle and you will not have any issue because of it that is why I say dont let it worry you. It really is such a small amount you might not even have noticed it.
DD
Title: Re: Project Realistic Rig
Post by: speedfr on April 01, 2018, 08:42:51 PM
Post by: speedfr on April 01, 2018, 08:42:51 PM
;)
Hello everybody...
After this 15° angle pissing off situation, i choose not to redo everything, and anyway, had other bad things in life to solve, so i put aside the handlebar for a while.
Going back on it, i finished the upper part which is the steering head and the handlebar system with the MTE (Mechanic To Electronic) and this part is finished for the main stuff, now i have the eye-candy left to do but later.
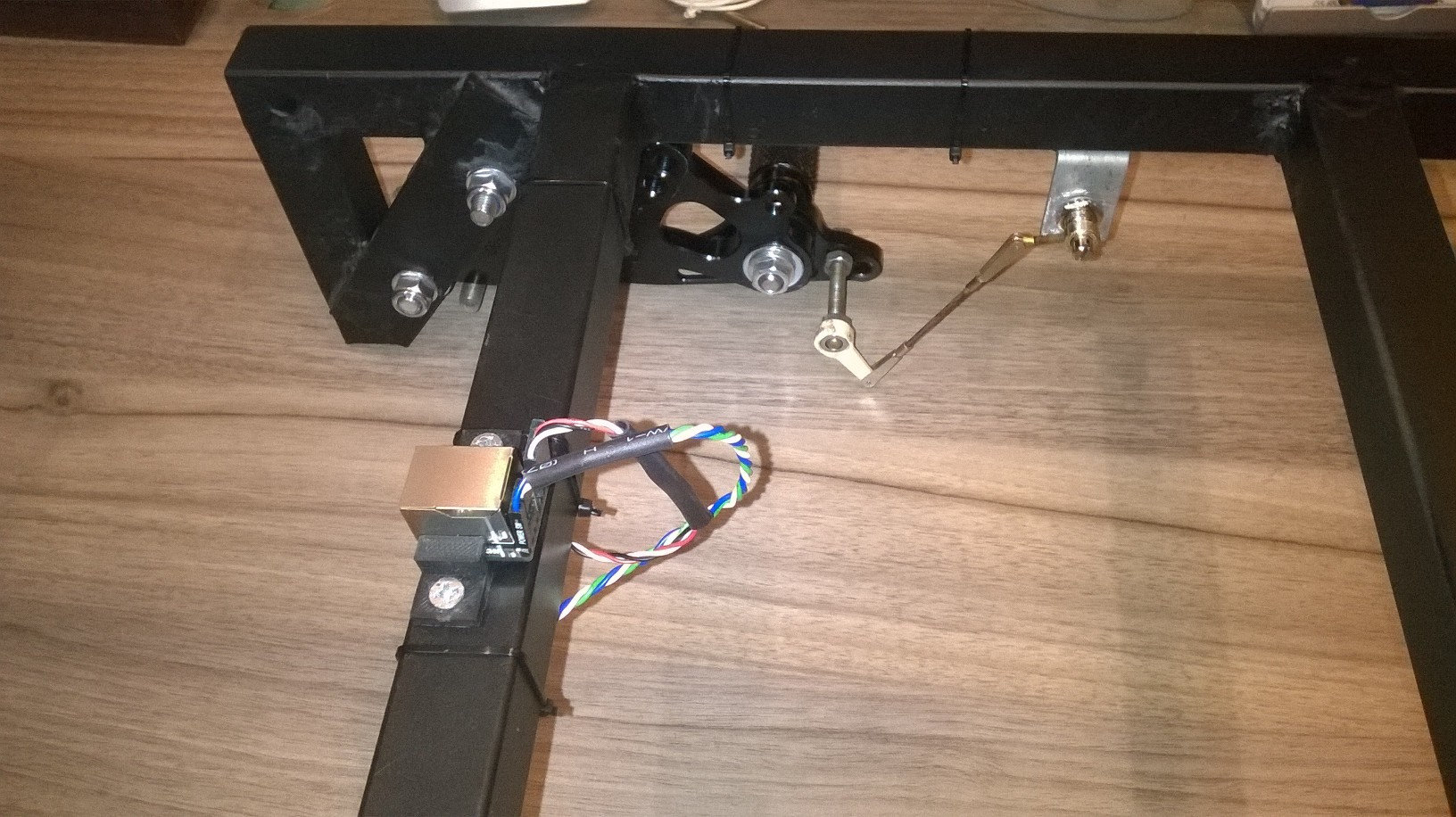
Now remains the feet stuff with the rearset i bought. On this pict you'll see a RJ45 empty plug, it is for the rear brake and the gear shift commands.
I'm gonna try that out a little and hopefully in the next 2 weeks the rearset will be done and then time to come back to the track !!!! Can't wait, can't wait !!
As a reminder, i'd like to say that i bought from DD the MTE, main plate and the elctronics (Leo Bodnar and the 5 potentiometers) and i have to say too that he gave me the right to copy his own system, the famous HS3.
So, it's a copy, with my "flavor" not as perfect as his stuff but i'm not selling it (no way), it's not as professional and obviously it's a little bit akward and not finished as well, but i'd like to thank Innovative Analog System boss which gave me the occasion to have something to start from : So DD, thanks again, that makes my dream comes true and that was so fun to make it, i can't help it my hands need to work on something as much as my brain.
now, my mind is going to the next one, for my son William, and since i managed to learn my 3D printer, i can now have a tool to make the parts that i draw on Sketchup.
Enjoy !!! (click on pictures to enlarge)

Hello everybody...
After this 15° angle pissing off situation, i choose not to redo everything, and anyway, had other bad things in life to solve, so i put aside the handlebar for a while.
Going back on it, i finished the upper part which is the steering head and the handlebar system with the MTE (Mechanic To Electronic) and this part is finished for the main stuff, now i have the eye-candy left to do but later.
Now remains the feet stuff with the rearset i bought. On this pict you'll see a RJ45 empty plug, it is for the rear brake and the gear shift commands.
I'm gonna try that out a little and hopefully in the next 2 weeks the rearset will be done and then time to come back to the track !!!! Can't wait, can't wait !!
As a reminder, i'd like to say that i bought from DD the MTE, main plate and the elctronics (Leo Bodnar and the 5 potentiometers) and i have to say too that he gave me the right to copy his own system, the famous HS3.
So, it's a copy, with my "flavor" not as perfect as his stuff but i'm not selling it (no way), it's not as professional and obviously it's a little bit akward and not finished as well, but i'd like to thank Innovative Analog System boss which gave me the occasion to have something to start from : So DD, thanks again, that makes my dream comes true and that was so fun to make it, i can't help it my hands need to work on something as much as my brain.
now, my mind is going to the next one, for my son William, and since i managed to learn my 3D printer, i can now have a tool to make the parts that i draw on Sketchup.
Enjoy !!! (click on pictures to enlarge)
Title: Re: Project Realistic Rig
Post by: KG_03 on April 01, 2018, 09:09:32 PM
Post by: KG_03 on April 01, 2018, 09:09:32 PM
OMG are you building space shuttle or sth? Looks amazing :-O
Title: Re: Project Realistic Rig
Post by: speedfr on April 01, 2018, 09:19:04 PM
Post by: speedfr on April 01, 2018, 09:19:04 PM
Yes.
The Millenium Falcon cockpit it is.
The Force with me, will be. ;D
And can't wait to invite you (and others that i crossed on server) for a good ride on my ZF GP dedicate server - until we found each other in Brno on real ones :)
The thing is, its sturdy and big, but i can tell you that i can let my arms and body weight on it while moving, it can handle that no problem.
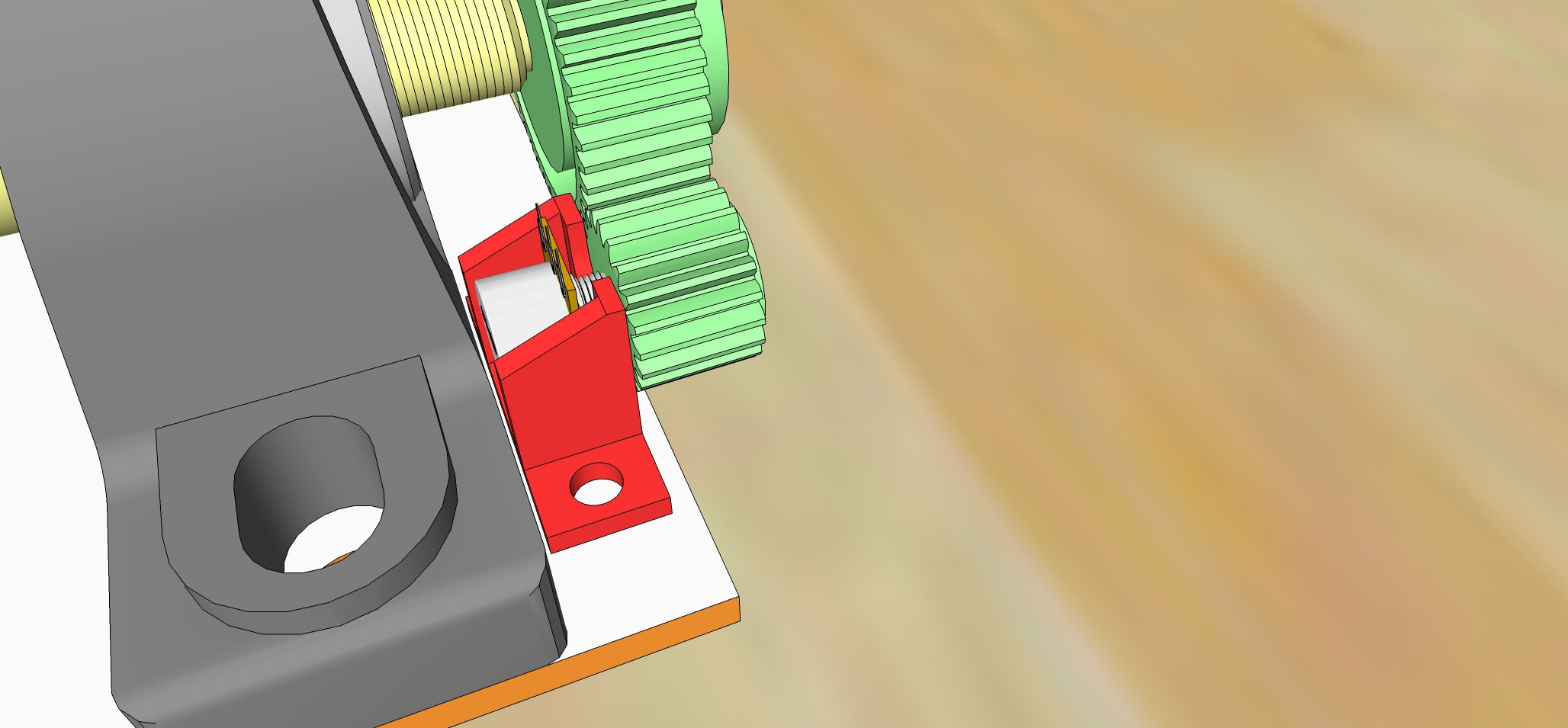
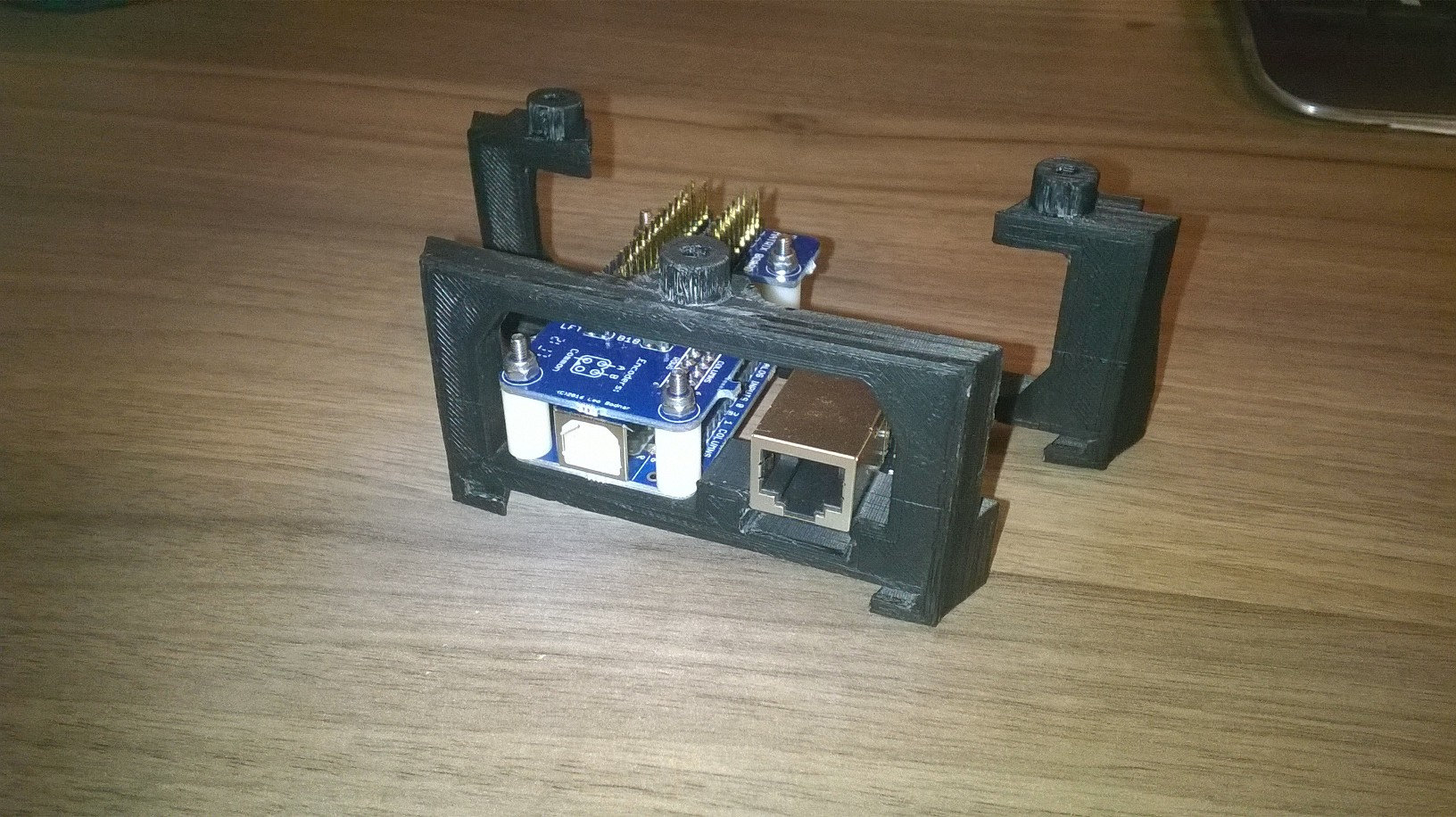
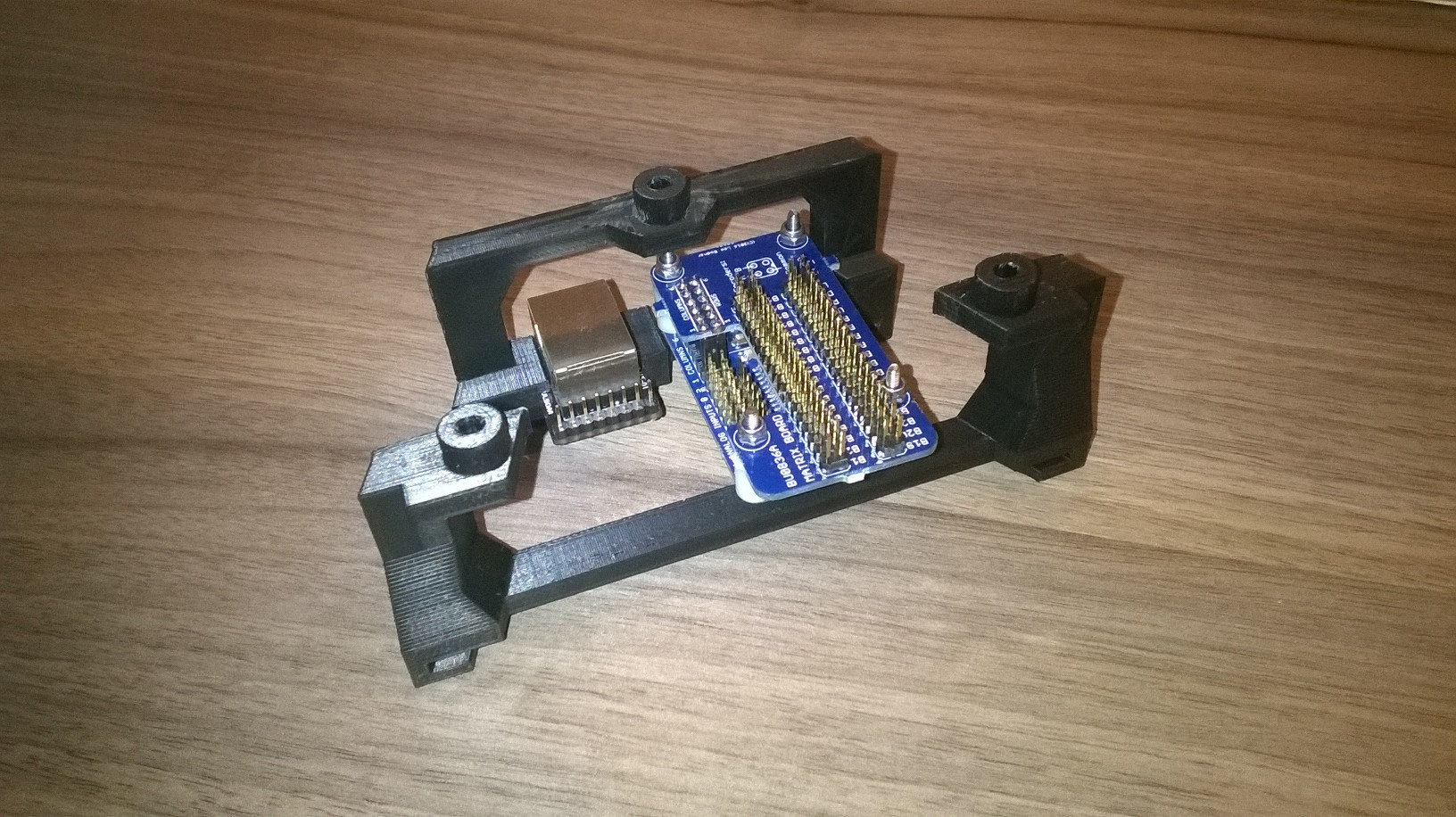
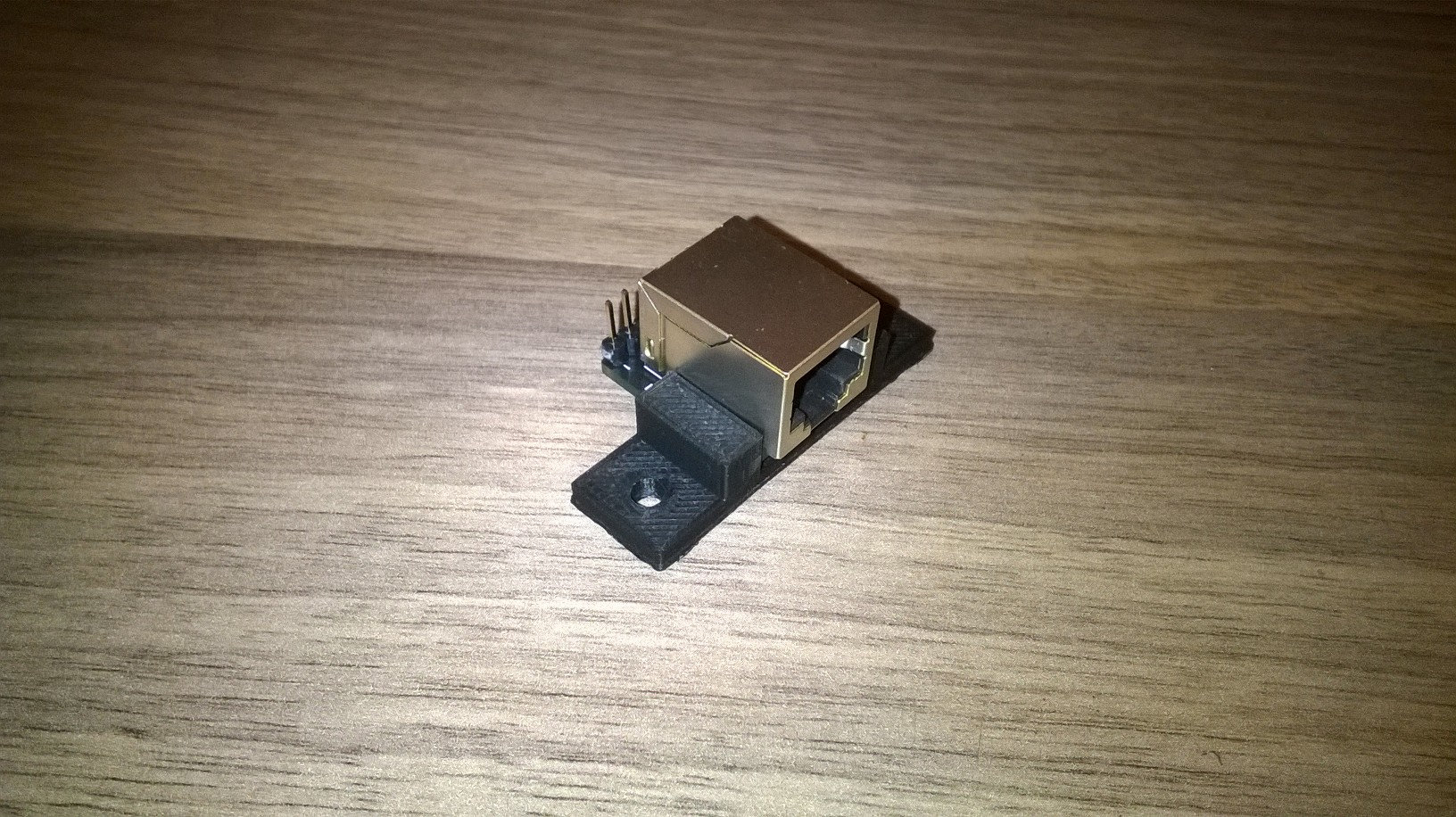
The two last pict are my last 3D printing production to carry the Leo Bodnar USB device, it's just slided on the main plate, doesn't need to be screwed or anything so that's why you have this triangular shape as a Empire Cruiser.
May the Force be with Us !! :)
The Millenium Falcon cockpit it is.
The Force with me, will be. ;D
And can't wait to invite you (and others that i crossed on server) for a good ride on my ZF GP dedicate server - until we found each other in Brno on real ones :)
The thing is, its sturdy and big, but i can tell you that i can let my arms and body weight on it while moving, it can handle that no problem.
The two last pict are my last 3D printing production to carry the Leo Bodnar USB device, it's just slided on the main plate, doesn't need to be screwed or anything so that's why you have this triangular shape as a Empire Cruiser.
May the Force be with Us !! :)
Title: Re: Project Realistic Rig
Post by: speedfr on April 10, 2018, 04:48:26 PM
Post by: speedfr on April 10, 2018, 04:48:26 PM
Little update with the rearset in place, the frame that holds it is finished and it works.
Working on the "brake" for the main axis so it doesn't wiggle all the way left and right, and i'll post a complete set of the rig.
Maybe a tiny video as soon as it's ready.
The rig works great, the only stuff that i finfd weird is not to cluthc at each speed, a little bit akward but i guess that will come. And i think i stalled 30 times !!!
Coming back later. (clickable pictures)


Working on the "brake" for the main axis so it doesn't wiggle all the way left and right, and i'll post a complete set of the rig.
Maybe a tiny video as soon as it's ready.
The rig works great, the only stuff that i finfd weird is not to cluthc at each speed, a little bit akward but i guess that will come. And i think i stalled 30 times !!!
Coming back later. (clickable pictures)
Title: Re: Project Realistic Rig
Post by: doubledragoncc on April 11, 2018, 10:45:42 AM
Post by: doubledragoncc on April 11, 2018, 10:45:42 AM
Great work speedy
Look forward to some vids of you riding and having fun.
DD
Look forward to some vids of you riding and having fun.
DD
Title: Re: Project Realistic Rig
Post by: speedfr on April 11, 2018, 01:48:10 PM
Post by: speedfr on April 11, 2018, 01:48:10 PM
thanks DD but i guess this is going to be the hardest, do a video where i film myself with the webcam and mixing that in OBS. That gives me a lot of question but it's going to come, slowly but surely.
I retried on Victoria yesterday night, learning that the apex look is to forget for the leaning look which is a lot better to ride in first person.
And that way, being annoyed by the trainer that block my view...
Down to 1:45:xxx i start to hadle this rig better but yes, the lack of information makes it hard...compare to riding my bike in real life.
Still interested in finding a way to add a little electric motor on the steering/leaning axis to give some feedback...
But in terms of electronics, i have no idea how to catch this kind of information from the game as a FFB wheel does.
And i need to find a real bike seat to replace what i have now but the frame is perfect for me. (i took a medical seat for oldies (me, soon...)) to take a shower seating. And i use it on a 90° angle, it's super sturdy but white and blue, and the seat is soft but its just a question of look. You'll see in the video.
I retried on Victoria yesterday night, learning that the apex look is to forget for the leaning look which is a lot better to ride in first person.
And that way, being annoyed by the trainer that block my view...
Down to 1:45:xxx i start to hadle this rig better but yes, the lack of information makes it hard...compare to riding my bike in real life.
Still interested in finding a way to add a little electric motor on the steering/leaning axis to give some feedback...
But in terms of electronics, i have no idea how to catch this kind of information from the game as a FFB wheel does.
And i need to find a real bike seat to replace what i have now but the frame is perfect for me. (i took a medical seat for oldies (me, soon...)) to take a shower seating. And i use it on a 90° angle, it's super sturdy but white and blue, and the seat is soft but its just a question of look. You'll see in the video.
Title: Re: Project Realistic Rig
Post by: speedfr on April 11, 2018, 10:17:57 PM
Post by: speedfr on April 11, 2018, 10:17:57 PM
The complete rig display.
i stole the kids screen (for xbox/wii) for a try. 32 inches is the good size... (clickable pict)

i stole the kids screen (for xbox/wii) for a try. 32 inches is the good size... (clickable pict)
Title: Re: Project Realistic Rig
Post by: HornetMaX on April 14, 2018, 07:17:31 PM
Post by: HornetMaX on April 14, 2018, 07:17:31 PM
Quote from: speedfr on April 11, 2018, 10:17:57 PMGet an ultrawide (21:9) for extra fov.
i stole the kids screen (for xbox/wii) for a try. 32 inches is the good size... (clickable pict)
There's also a samsung 32:9 but it's a bit pricey :)
Title: Re: Project Realistic Rig
Post by: speedfr on April 14, 2018, 07:41:45 PM
Post by: speedfr on April 14, 2018, 07:41:45 PM
Yes, nice idea Max and thank you.
But i'm going to another 16:9 screen because it's my work computer as well and i need to read and work on it and 21:9 are too low in design.
And i'm on a GTX1070 so 1440p is correct but higher will be a problem.
On the ugly 32" of my kids (ugly because under Windows you can't read or you get blind) playing was a lot easier for the fov, now on my 25", i put it to the mini, 60°. But it's still hard to see the next curve exactly.
On the 32" it was a lot easier.
My whish is the Brillance Philips in 1440p, USB hub inside, blue light system, rotation possible, it comes with every parameters that i need. Even the price is not too hard, around 300€.
So far, that will be my choice.
On the other side, i'm searching to find a way to get the FFB on my rig, using Arduino and a lot of coding. Still in WIP.
But i'm going to another 16:9 screen because it's my work computer as well and i need to read and work on it and 21:9 are too low in design.
And i'm on a GTX1070 so 1440p is correct but higher will be a problem.
On the ugly 32" of my kids (ugly because under Windows you can't read or you get blind) playing was a lot easier for the fov, now on my 25", i put it to the mini, 60°. But it's still hard to see the next curve exactly.
On the 32" it was a lot easier.
My whish is the Brillance Philips in 1440p, USB hub inside, blue light system, rotation possible, it comes with every parameters that i need. Even the price is not too hard, around 300€.
So far, that will be my choice.
On the other side, i'm searching to find a way to get the FFB on my rig, using Arduino and a lot of coding. Still in WIP.
Title: Re: Project Realistic Rig
Post by: HornetMaX on April 14, 2018, 08:06:42 PM
Post by: HornetMaX on April 14, 2018, 08:06:42 PM
Quote from: speedfr on April 14, 2018, 07:41:45 PMJust a matter of size. 35" 21:9 is very fine for work :)
Yes, nice idea Max and thank you.
But i'm going to another 16:9 screen because it's my work computer as well and i need to read and work on it and 21:9 are too low in design.
Quote from: speedfr on April 14, 2018, 07:41:45 PMYour 1070 will do OK, especially for PiBoSo's games.
And i'm on a GTX1070 so 1440p is correct but higher will be a problem.
Used to have a 970 on a 3440x1440 35" 21:9: no issue for GPB & co.
Quote from: speedfr on April 14, 2018, 07:41:45 PMAh, if your budget is in that range, then you can drop the 21:9 idea :)
My whish is the Brillance Philips in 1440p, USB hub inside, blue light system, rotation possible, it comes with every parameters that i need. Even the price is not too hard, around 300€.
Title: Re: Project Realistic Rig
Post by: speedfr on April 14, 2018, 08:43:13 PM
Post by: speedfr on April 14, 2018, 08:43:13 PM
You're fully right Max but i play other games mostly DCS and maybe one day (!!) Star Citizen - SQ42 so 1440p will be the max for my 1070. i spend time sometimes on FPS too, to release the pressure (Arma3).
We will see what we can expect from the 20x0 series or the next gen Radeon but prices are way to high lately. Can't afford a 1080 or higher, it's getting insane. The thing is, we have 6 kids and even if they are mostly major today, studies still is a real budget eater.
I'm not complaining, it's just that between video cards, Ram and others, i stay with my old i7 and hope that my 1070 will last long too.
Sure for Piboso games, even a APU is fine. Which is great. ;D
I've tried 21:9 on a curve screen. Wasn't that great for the price and maybe already too old but seatting at 70cm from the screen (100cm when "riding" on GP bike now), i found the 32" huge already, almost like at the movie theater when you sit in front of the screen, have to turn my head to see everything (perfect for Interstellar for example).
We will see what we can expect from the 20x0 series or the next gen Radeon but prices are way to high lately. Can't afford a 1080 or higher, it's getting insane. The thing is, we have 6 kids and even if they are mostly major today, studies still is a real budget eater.
I'm not complaining, it's just that between video cards, Ram and others, i stay with my old i7 and hope that my 1070 will last long too.
Sure for Piboso games, even a APU is fine. Which is great. ;D
I've tried 21:9 on a curve screen. Wasn't that great for the price and maybe already too old but seatting at 70cm from the screen (100cm when "riding" on GP bike now), i found the 32" huge already, almost like at the movie theater when you sit in front of the screen, have to turn my head to see everything (perfect for Interstellar for example).
Title: Re: Project Realistic Rig
Post by: doubledragoncc on April 15, 2018, 09:46:39 AM
Post by: doubledragoncc on April 15, 2018, 09:46:39 AM
I use a 40inch flatscreen TV and only 1080p but love it for GPB if not doing vr. I have an Asus Strix 1060 OC at 2000mhz and works a dream for most BUT Star citizen wont run for shite, crashes all the time and terrible fps. I run full Asus ROG system with 16GB 4000mhz memory and my problem is i5 7600 4800mhz but SC dont like it since 3.0 release, 2.6 ran great but now it is just a pain so if you want to run SC in even 1080p make it a gtx1080 and i7 7700 at least to play it at all and put it on a SSD as it takes years to load from normal HD.
Thought it best to say speedy as hating SC right now lol. The 40inch is perfect for 1p riding as the bike is the right size. It is also great for my design work.
btw my screen cost £200 new and is 200hz no only 60hz like most. Here in UK can get Ultra HD 4k 40inch for £399 and probably less just did a quick glance on ebay to see
DD
Thought it best to say speedy as hating SC right now lol. The 40inch is perfect for 1p riding as the bike is the right size. It is also great for my design work.
btw my screen cost £200 new and is 200hz no only 60hz like most. Here in UK can get Ultra HD 4k 40inch for £399 and probably less just did a quick glance on ebay to see
DD
Title: Re: Project Realistic Rig
Post by: speedfr on April 15, 2018, 02:32:35 PM
Post by: speedfr on April 15, 2018, 02:32:35 PM
Hi DD,
i know bigger is better (!!) but as i saw on my kids screen, working on a TV is a kill for the eyes otherwise i would have stolen the main TV screen but wifey will kill me as well...
No, i need a working screen too. Where i can spend hours on Excel and Word. Same for Cura and Sketchup.
And my work is to make gaming computer, including WC and other so i know what to use for a video card the only thing is, i'm not gonna put 600 fuc*$%g € in a video card, that's way too much.
About Star Citizen, we still are on 3.1, fps increased quiet a bit since 3.1 but i'm tired of redoing my xml files each time for my Hotas so i'll wait for SQ42, dreaming of my youth with Wing Commander or Starlancer taste still in my mind.
And, my rig works great. Perfect. I have to say that its very natural and great to ride, rear braking and clutching is a great plus. But the lack of information from the leaning is horrible.
So, and i know you are kind of "against" that, but i'm gonna disassembly a old FFB steering wheel in order to put FFB on my leaning axis, that way the steering head will be linked as a "Logitech/Microsoft/Thrusmaster" wheel using the FFB inside and the rest will be Leo Bodnar.
I have to work on that and find out is i need to change the potentiometer or maybe have bigger demultiplication because a handlebar is a lot longer than a wheel and the moment of force applied is almost 3 times bigger.
I've been spending time on trying to find out how to catch FFB information from the software and then translating that to an Arduino to monitor a DC motor but it's quiet hard to execute, i think for a few € i can find a used FFB wheel and then operate it !!
I'll come back with more asap.
Have a nice sunday guys, in here, finally, Spring is coming after 5 month of rain !!
i know bigger is better (!!) but as i saw on my kids screen, working on a TV is a kill for the eyes otherwise i would have stolen the main TV screen but wifey will kill me as well...
No, i need a working screen too. Where i can spend hours on Excel and Word. Same for Cura and Sketchup.
And my work is to make gaming computer, including WC and other so i know what to use for a video card the only thing is, i'm not gonna put 600 fuc*$%g € in a video card, that's way too much.
About Star Citizen, we still are on 3.1, fps increased quiet a bit since 3.1 but i'm tired of redoing my xml files each time for my Hotas so i'll wait for SQ42, dreaming of my youth with Wing Commander or Starlancer taste still in my mind.
And, my rig works great. Perfect. I have to say that its very natural and great to ride, rear braking and clutching is a great plus. But the lack of information from the leaning is horrible.
So, and i know you are kind of "against" that, but i'm gonna disassembly a old FFB steering wheel in order to put FFB on my leaning axis, that way the steering head will be linked as a "Logitech/Microsoft/Thrusmaster" wheel using the FFB inside and the rest will be Leo Bodnar.
I have to work on that and find out is i need to change the potentiometer or maybe have bigger demultiplication because a handlebar is a lot longer than a wheel and the moment of force applied is almost 3 times bigger.
I've been spending time on trying to find out how to catch FFB information from the software and then translating that to an Arduino to monitor a DC motor but it's quiet hard to execute, i think for a few € i can find a used FFB wheel and then operate it !!
I'll come back with more asap.
Have a nice sunday guys, in here, finally, Spring is coming after 5 month of rain !!
Title: Re: Project Realistic Rig
Post by: h106frp on April 15, 2018, 03:02:04 PM
Post by: h106frp on April 15, 2018, 03:02:04 PM
You need a dll to link into GPB (dlo) and place the data in memory (the easy bit surprisingly, you can do it with codeblocks C) then some sort of host PC application to send this data to the arduino at a decent rate.
The host application also lets you scale the values, range check and limit (a must if you do not want the bars going berserk) and the ability to drive other stuff like a dash. I used microchip PIC and USB.
The host application also lets you scale the values, range check and limit (a must if you do not want the bars going berserk) and the ability to drive other stuff like a dash. I used microchip PIC and USB.
Title: Re: Project Realistic Rig
Post by: speedfr on April 15, 2018, 03:10:25 PM
Post by: speedfr on April 15, 2018, 03:10:25 PM
Thank you mate, that's what i understood from the few things i found about it.
But my level in coding is absolutely minimal (more a mechanical than a dev guy) so this part is going to be a nightmare for me.
I have a "Genius" friend that swim like a fish into that but once more, i don't want to bug or depend on somebody so i'll try to steal a FFB system and make it work with my stuff, if it doesn't work, i'll be coming to you, don't worry !!
It will be the same for my own custom frame, i'll ask a specialist to do me a nice black and yellow painting with #40 on it. (not a Hornet, a Bee !!).
Anywat what "host application" are you talking about ?
I found a RFR Wheel configuration actually and it might be that, no ?
Here (this guy makes everything with almost nothing, i'm impressed !! )
https://www.youtube.com/v/Snbkv_mvt8Q
But my level in coding is absolutely minimal (more a mechanical than a dev guy) so this part is going to be a nightmare for me.
I have a "Genius" friend that swim like a fish into that but once more, i don't want to bug or depend on somebody so i'll try to steal a FFB system and make it work with my stuff, if it doesn't work, i'll be coming to you, don't worry !!
It will be the same for my own custom frame, i'll ask a specialist to do me a nice black and yellow painting with #40 on it. (not a Hornet, a Bee !!).
Anywat what "host application" are you talking about ?
I found a RFR Wheel configuration actually and it might be that, no ?
Here (this guy makes everything with almost nothing, i'm impressed !! )
https://www.youtube.com/v/Snbkv_mvt8Q
Title: Re: Project Realistic Rig
Post by: h106frp on April 15, 2018, 03:15:46 PM
Post by: h106frp on April 15, 2018, 03:15:46 PM
This is the info I had when i started for the DLL part, link this with the info in the demo dll from PB and you should be able to make a unique formatted data block in memory that you can read from with the host app. :)
opensource codeblocks c http://www.codeblocks.org/ (http://www.codeblocks.org/)
opensource codeblocks c http://www.codeblocks.org/ (http://www.codeblocks.org/)
Code Select
Hi all,
I based my work on the clever use of the string tables that Pharoseer discribed in his post "Making a DLL with C++ Express" : http://forum.thegamecreators.com/?m=forum_view&t=165006&b=18
I reduced as possible the steps needed to create a DLL using Code::Blocks (MinGW compiler).
I won't write a full tutorial, The GameCreators already did it, so before to go further please read carefuly The Third Party Commands topic you'll find into the help file of DBP (Technical Documents Section).
So, I assume you are familiar with the process and the explanations regarding the creation of a DLL using Visual C++ ; things are a bit different using Code::Blocks but it will be quite easy using the following steps :
(Note : for this example I used the last official version of Code::Block v8.02 including MinGW)
1) Create a DLL project
- Launch Code::Blocks
- Click on "Create a New Project"
- Click on "Dynamic Link Library"
- Let's give a name to our DLL project e.g. "TestDLL" (a new folder with the same name will be created into the Code::Blocks' Projects folder)
- Click on "Next" then "Finish" buttons to complete the project creation.
Now the "Projects" tab displays the name of our project ("TestDll") with 2 items : "Sources" and "Headers"
You'll notice that the Wizard's DLL creation tool has created some code as a default example, but let's make our own instead :
- Open the "Headers" tree then Right Click on the file named "main.h" and select "Remove file from project" : the "Headers" tree has been removed.
- Open The "Sources" tree and edit the "main.cpp" to remove all the code ((CTRL+A) then DELETE). Now we have got a blank page.
2) Write some functions in our DLL
Copy the code below (which contains 2 simple fonctions) in our "main.cpp" file.
main.cpp
+ Code Snippet
#include <windows.h>
#define EXPORT __declspec (dllexport)
EXPORT int Square( int X) // Return Square
{
return X*X;
}
EXPORT int Cube( int X) // Return Cube
{
return X*X*X;
}
3) Configure the project's properties to create a .DEF file
This file will allow us to get automatically the complete list of the functions of the DLL in their decorated form.
- In the "Projects" tab, Right Click on the project name "TestDLL" and select "Properties..."
- Click on the "Build targets" tab and check that the option "Create .DEF exports file" is selected.
- When done click on the "OK" button to proceed.
4) Build our DLL (CTRL+F9)
The DLL we created can't be used "as this" from DBP but this step will help us to obtain complementary informations to build the final one because the .def file was created.
5) Create a String Table in a Resource File
- Create a new empty text file into the "TestDLL" folder (located in the Code::Blocks' Projects folder) and rename it as "TestDLL.rc" (this is a Resources file).
- Open the "....Projects\TestDLL\bin\Debug" folder.
- Use Notepad to open the file "libTestDLL.def" which contains the full list of our functions in their decorated form.
libTestDLL.def
+ Code Snippet
EXPORTS
_Z4Cubei @1
_Z6Squarei @2
- Go back to Code:Blocks
- In the "Projects" tab, Right Click on the project name ("TestDLL") and select "Add Files..."
- Select the file "TestDLL.rc" you just have created.
- When asked for "Multiple Selection", click on "Select All" then "OK" buttons : you just added the Resources file to the Project.
- Open the "Resources" tree then double click on the name "TestDLL.rc" to edit the file.
- Copy the code below in the Resource file. As you can see, this code contains the decorated form of the functions we previously found into the .def file.
Stringtable
+ Code Snippet
STRINGTABLE
{
1 "CUBE[%LL%_Z4Cubei%"
2 "SQUARE[%LL%_Z6Squarei%"
}
6) Build the final version of the DLL (CTRL+F9)
7) Copy the file "TestDLL.dll" located into "....\Projects\TestDLL\bin\Debug" into the "plugins-user" folder of DBP (....Dark Basic Professional\Compiler\plugins-user).
8) Test our functions from DBP :
DBP Code
+ Code Snippet
I=Square(4) : Print "4*4 = ",I
I=Cube(4) : Print "4*4*4 = ",I
Wait Key
Of course you can create your DLL in release mode (Properties --> Build targets Tab)
I hope this will help.
Title: Re: Project Realistic Rig
Post by: speedfr on April 15, 2018, 03:19:57 PM
Post by: speedfr on April 15, 2018, 03:19:57 PM
That's great info that h106frp, i'll have a look at it.
Thank you. :)
And @DD, adding a FFB on the leaning axis will be a great update for your HSx system, if it becomes not too difficult, that could increase a lot the clients for you since that's exactly what we need to "feel" the bike. And this lack of feeling is really loosing me. Maybe am i too perfectionnist, i'll see...
Thank you. :)
And @DD, adding a FFB on the leaning axis will be a great update for your HSx system, if it becomes not too difficult, that could increase a lot the clients for you since that's exactly what we need to "feel" the bike. And this lack of feeling is really loosing me. Maybe am i too perfectionnist, i'll see...
Title: Re: Project Realistic Rig
Post by: h106frp on April 15, 2018, 03:23:52 PM
Post by: h106frp on April 15, 2018, 03:23:52 PM
Just found this on my backup drive :) , the codeblocks DLL project. It will probably need the declarations updating to the current PB b13 DLL template from the GPB downloads area
Might give you a start though
https://drive.google.com/file/d/19eDOmZfkW7ldKOH-O2g-JYJa5VLPxXcU/view?usp=sharing (https://drive.google.com/file/d/19eDOmZfkW7ldKOH-O2g-JYJa5VLPxXcU/view?usp=sharing)
Might give you a start though
https://drive.google.com/file/d/19eDOmZfkW7ldKOH-O2g-JYJa5VLPxXcU/view?usp=sharing (https://drive.google.com/file/d/19eDOmZfkW7ldKOH-O2g-JYJa5VLPxXcU/view?usp=sharing)
Title: Re: Project Realistic Rig
Post by: speedfr on April 15, 2018, 05:28:50 PM
Post by: speedfr on April 15, 2018, 05:28:50 PM
I run dl that and have a look at all of that.
On one side, there's the programming and electronics while on the other side, there's adaptation and mechanics.
At first, i'll go to the second.
But since i have archives about it now, i might go for the first choice.
Need to understand at first.
Thanks again h106frp, that's really really nice of you.
Ps : Video about my realisation is uploading to YT and be posted in here asap. It's dedicate to DD. ;D
On one side, there's the programming and electronics while on the other side, there's adaptation and mechanics.
At first, i'll go to the second.
But since i have archives about it now, i might go for the first choice.
Need to understand at first.
Thanks again h106frp, that's really really nice of you.
Ps : Video about my realisation is uploading to YT and be posted in here asap. It's dedicate to DD. ;D
Title: Re: Project Realistic Rig
Post by: speedfr on April 15, 2018, 07:38:23 PM
Post by: speedfr on April 15, 2018, 07:38:23 PM
Here is the little video about my rig.
https://www.youtube.com/v/9TZ4ogju2GQ
https://www.youtube.com/v/9TZ4ogju2GQ
Title: Re: Project Realistic Rig
Post by: doubledragoncc on April 16, 2018, 08:29:12 AM
Post by: doubledragoncc on April 16, 2018, 08:29:12 AM
Great video speedy. Thank you for the very kind words and support. Very good work you have done. I use 100% direct lean to get better control of the bike btw
I do want to have FFB it is just a cost issue for now. I wanted to get hydraulic brakes done first so now can think about FFB. I want to find a way so I can add it to all systems for old customers and not just new ones so that is part of the problem but have some idea how to do it, just have to get it all figured out lol.
DD
I do want to have FFB it is just a cost issue for now. I wanted to get hydraulic brakes done first so now can think about FFB. I want to find a way so I can add it to all systems for old customers and not just new ones so that is part of the problem but have some idea how to do it, just have to get it all figured out lol.
DD
Title: Re: Project Realistic Rig
Post by: Hawk on April 16, 2018, 02:14:32 PM
Post by: Hawk on April 16, 2018, 02:14:32 PM
Looking goood Speedy! Nice job mate! ;) 8)
Title: Re: Project Realistic Rig
Post by: speedfr on April 16, 2018, 02:34:14 PM
Post by: speedfr on April 16, 2018, 02:34:14 PM
Thank you guys. :)
And yes, DD, that was for your eyes mostly, to check that your babies are well treated... ;D
And i'm going to "re" try a FFB sterring wheel to understand what was making this way of leaning so great and efficient.
Better that a joystick.
And more smooth and controlable than my handlebar.
Because what i think last time i tried, is that actually FFB effect was off on GP Bikes and only the fact that "basic" FFB was on, meaning the come back to the center position.
And that centering forces against you constantly. Giving you something to counter-steer and at the same time, avoiding the handlebar to wiggle left and right, making me loose the benefit of a handlebar position as on my bike.
A little bit as a steering damper but this element smooth the mouvement but doesn't force against you, just making the movement more linear.
If its what i "feel" then FFB is not necessary. Springs are theoricaly enough, except they don't force on a linear way and tiny force at beginning, big at the end so it's not springs the solution. I've tried a lot of them, different position, deifferent diameter of steel, all kinds of solutions, its not as it was with the steering wheel + FFB minimum that i recall in my mind.
I'll try tonight with the one i'm stealing and then i'll have my answer.
If its "just" a matter of having a DC motor forcing against my arms to take it back to middle position, i guess that's a lot easier to execute then a real FFB device.
Need a encoder to read the angle, a DC motor, a little electronic basic to rules the motor, probably a old Power Supply for computer and the bigger work will be to calculate the gearing for the reduction. Or go with a belt.
Well, it's not finished but yeah, it's coming !!!
(the real thing will be to have hard time leaning as i brake in curve, as in reality and that's really troubling me that when i brake and lean, it's not harder to do, i'd like to be seating there, and have the same feelings... The Graal !!! )
Oh, and DD you're right, i did put 100 direct lean and it's way easier at least with a handlebar.
And yes, DD, that was for your eyes mostly, to check that your babies are well treated... ;D
And i'm going to "re" try a FFB sterring wheel to understand what was making this way of leaning so great and efficient.
Better that a joystick.
And more smooth and controlable than my handlebar.
Because what i think last time i tried, is that actually FFB effect was off on GP Bikes and only the fact that "basic" FFB was on, meaning the come back to the center position.
And that centering forces against you constantly. Giving you something to counter-steer and at the same time, avoiding the handlebar to wiggle left and right, making me loose the benefit of a handlebar position as on my bike.
A little bit as a steering damper but this element smooth the mouvement but doesn't force against you, just making the movement more linear.
If its what i "feel" then FFB is not necessary. Springs are theoricaly enough, except they don't force on a linear way and tiny force at beginning, big at the end so it's not springs the solution. I've tried a lot of them, different position, deifferent diameter of steel, all kinds of solutions, its not as it was with the steering wheel + FFB minimum that i recall in my mind.
I'll try tonight with the one i'm stealing and then i'll have my answer.
If its "just" a matter of having a DC motor forcing against my arms to take it back to middle position, i guess that's a lot easier to execute then a real FFB device.
Need a encoder to read the angle, a DC motor, a little electronic basic to rules the motor, probably a old Power Supply for computer and the bigger work will be to calculate the gearing for the reduction. Or go with a belt.
Well, it's not finished but yeah, it's coming !!!
(the real thing will be to have hard time leaning as i brake in curve, as in reality and that's really troubling me that when i brake and lean, it's not harder to do, i'd like to be seating there, and have the same feelings... The Graal !!! )
Oh, and DD you're right, i did put 100 direct lean and it's way easier at least with a handlebar.
Title: Re: Project Realistic Rig
Post by: doubledragoncc on April 16, 2018, 06:41:17 PM
Post by: doubledragoncc on April 16, 2018, 06:41:17 PM
There are many things happening now I can not talk about yet but the motorcycle simulation industry is going to change this year. Keep being inventive and positive. It gonna get real.
DD
DD
Title: Re: Project Realistic Rig
Post by: damonboss on April 16, 2018, 06:43:41 PM
Post by: damonboss on April 16, 2018, 06:43:41 PM
smoking bad
Title: Re: Project Realistic Rig
Post by: speedfr on April 16, 2018, 07:13:01 PM
Post by: speedfr on April 16, 2018, 07:13:01 PM
Quote from: doubledragoncc on April 16, 2018, 06:41:17 PM
There are many things happening now I can not talk about yet but the motorcycle simulation industry is going to change this year. Keep being inventive and positive. It gonna get real.
DD
NDA ? with Gren.... sniffing it.... ;D
Quote from: damonboss on April 16, 2018, 06:43:41 PM
smoking bad
???? :o
Title: Re: Project Realistic Rig
Post by: speedfr on April 16, 2018, 08:46:08 PM
Post by: speedfr on April 16, 2018, 08:46:08 PM
Coming back on my "feelings" and after retrying, i noticed that FFB stayed off on GP Bikes and i had what i wanted : the fact that the wheel constantly, not too strong but always there, try to go back to center and at the same time maintain the pressure on both sides give back this perfect feeling (at least to me).
So, as i was thinking before, FFB is not the thing to search for.
"Just" need to get a back to zero, just as springs does, but having a mechanical maintain of the handlebar, both ways, fighting against you, is perfect.
So, yes, a DC motor with a stereo potentiometers on the lean axis, one for the reading for the Leo Bodnar then the game, the other one to catch the angle and the movement. And in between some Arduino stuff that could sniff the exhaust of the potentiometer to tell the Dc motor what to do.
Need to find good reduction gear to fight a handlebar which is big, at least the double of a steering wheel.
That's the plan Stan ! ;D
And if possible, the Graal would be making this movement harder when braking from front, as it is in real life. Actually, the lever we use are regular ones, designed to accept a braking switch to turn the stop lights so, that will be the ignition that the Arduino will have to read in order to give the Dc motor the instructions to be stronger while braking. That way, the gyroscopic effect making the bike go strait instead of turning will be able to be in the pilot feelings.
Sure, the ones that rides knows that and how different the situation is when we have to "naturally" fight against that effect.
After that, i think, the main objective will be reached.
But with a system like that, my first post with my first draw becomes possible. All in all, trying to get to the same point by different way.
So, that's not finished :)
So, as i was thinking before, FFB is not the thing to search for.
"Just" need to get a back to zero, just as springs does, but having a mechanical maintain of the handlebar, both ways, fighting against you, is perfect.
So, yes, a DC motor with a stereo potentiometers on the lean axis, one for the reading for the Leo Bodnar then the game, the other one to catch the angle and the movement. And in between some Arduino stuff that could sniff the exhaust of the potentiometer to tell the Dc motor what to do.
Need to find good reduction gear to fight a handlebar which is big, at least the double of a steering wheel.
That's the plan Stan ! ;D
And if possible, the Graal would be making this movement harder when braking from front, as it is in real life. Actually, the lever we use are regular ones, designed to accept a braking switch to turn the stop lights so, that will be the ignition that the Arduino will have to read in order to give the Dc motor the instructions to be stronger while braking. That way, the gyroscopic effect making the bike go strait instead of turning will be able to be in the pilot feelings.
Sure, the ones that rides knows that and how different the situation is when we have to "naturally" fight against that effect.
After that, i think, the main objective will be reached.
But with a system like that, my first post with my first draw becomes possible. All in all, trying to get to the same point by different way.
So, that's not finished :)
Title: Re: Project Realistic Rig
Post by: doubledragoncc on April 16, 2018, 08:58:28 PM
Post by: doubledragoncc on April 16, 2018, 08:58:28 PM
Not sure what you mean about centering. My systems auto center so you can let go of the bars and they are dead straight?
A lot of feeling comes rom how you sit. If the bars are just in front of you it wont work. You have to be leaning down on them. Everyone gets it wrong and has the bars too high. Use them like on a real bike not like a car system.
DD
A lot of feeling comes rom how you sit. If the bars are just in front of you it wont work. You have to be leaning down on them. Everyone gets it wrong and has the bars too high. Use them like on a real bike not like a car system.
DD
Title: Re: Project Realistic Rig
Post by: speedfr on April 16, 2018, 09:12:12 PM
Post by: speedfr on April 16, 2018, 09:12:12 PM
You'll see on the video, I'm on my arms and wrists. My basin is at the same level as the handlebar almost.
But i know i don't explain well because of English. Will be a lot easier in French... But i will try to explain that to you through the video.
I don't care actually that it centers back, it just that by doing that, when you push to the left, it forces to the right, giving me something to countersteer, meaning putting a force on the opposite side on my turn.
As on every bike.
And springs are good in princip but not in reality (to me). They are not linear in the way they fight you.
And retrying tonight with the FFB Wheel made the point. Its hard enough and smooth at the same time but it doesn't shake (what i called wiggle earlier but that might not be the word) and so the bike is going nicely round on the turn, like it supposed to be and exactly the way it is in real life.
And Allan, you know it, when you start a turn and brake at the same time, its harder to turn the bike, in your mind nothing to think about, you automatically adapt to that turn and know inside you that the supplementary effort is due to turn+braking. That's magic and the best braking i ever did on bike, on Ledenon for example (one more time, in real, with my 350RDLC, many many years ago) on a triple left, most on the brake fighting to turn and keep the trajectoire, that's what gives you the most thrill, specially when that means keeping your place or trying to catch one on this special curves.
So, that's what i called Graal to me. Having this feeling in GP Bikes whitout risk anymore since anyway, too old and too parents to have time/money and capacities to do it for real. And tired of racing "by procuration" with MM, VR and Zarco !!!
But i know i don't explain well because of English. Will be a lot easier in French... But i will try to explain that to you through the video.
I don't care actually that it centers back, it just that by doing that, when you push to the left, it forces to the right, giving me something to countersteer, meaning putting a force on the opposite side on my turn.
As on every bike.
And springs are good in princip but not in reality (to me). They are not linear in the way they fight you.
And retrying tonight with the FFB Wheel made the point. Its hard enough and smooth at the same time but it doesn't shake (what i called wiggle earlier but that might not be the word) and so the bike is going nicely round on the turn, like it supposed to be and exactly the way it is in real life.
And Allan, you know it, when you start a turn and brake at the same time, its harder to turn the bike, in your mind nothing to think about, you automatically adapt to that turn and know inside you that the supplementary effort is due to turn+braking. That's magic and the best braking i ever did on bike, on Ledenon for example (one more time, in real, with my 350RDLC, many many years ago) on a triple left, most on the brake fighting to turn and keep the trajectoire, that's what gives you the most thrill, specially when that means keeping your place or trying to catch one on this special curves.
So, that's what i called Graal to me. Having this feeling in GP Bikes whitout risk anymore since anyway, too old and too parents to have time/money and capacities to do it for real. And tired of racing "by procuration" with MM, VR and Zarco !!!
Title: Re: Project Realistic Rig
Post by: poumpouny on April 17, 2018, 07:41:15 AM
Post by: poumpouny on April 17, 2018, 07:41:15 AM
FFB in GP Bikes is far more than "centering the handlebar" and I'm not even talking about Direct Steer FFB ;D. i'm sure you let the "autocenter" option of the wheel on when you tryed. Turn that off (i don't even know who need this centering thing but they keep it by default". All you're looking for (steering get hard when braking, woobling handle bar on hard exit/hard braking ...) is already handled by GPbikes FFB. I Think you're best solution is to fund a used G25 wheel and then just link your steer axis to the wheel (easier and cheaper that recreating a decent FFB from scratch). I'm doing (still in a long WIP) exactly the opposite of what youre doing, i'm making a handle bar that i could just "Attach" To my G29 Wheel ( a detacheable thing with what i will be swap between car and bike games).
Title: Re: Project Realistic Rig
Post by: speedfr on April 17, 2018, 08:39:58 AM
Post by: speedfr on April 17, 2018, 08:39:58 AM
Hello Poumpouny,
i just read your post and there's a way that i'm gonna explore and that what i described earlier and what you say in here, i'm first start from a old FFB wheel and attach it to the existing axis of my rig. Then see what happen.
But as far as i tried FFB on the wheel playing GP Bikes (full FFB not just the centering) i didn't like the all-shake stuff, probably need to be tune but it's not what i'm searching for the most.
The centering, one more time, i don't care, but the fact that it forces against you when leaning, that thing i want. And i'm gonna do.
But after that, yes, feeling harder when braking to lean, that will be an outcome since it's the main feeling to turn on a bike while braking.
And starting from a wheel that i "operate" to extract what i need is a good and easy idea, but in middle terms, i'd like to reproduce the rig for my youngest son ( they both are motorcycle riders too, like Daddy !!), who badly wants to ride too on GP Bikes with other thing than just the pad. So, it would be nice to understand and be able to reproduce. And if it's not that complex, give it to DD so he can add it to his HSx system.
At the same time, i hope you gonna reach your point and get what you want, but it's been 25 yrs almost that i'm playing Motorcycle game (GP500 mostly) on a Pc so i decided that at 50 yrs old, i could make my own complete stuff, i keep my old wheel safe and can use it if necessary but i don't want a "middle" solution. But i understand your choice and whish its gonna work nicely as you want it.
i found old wheel for a few € (20) and sure it's cheap. But an Arduino like plus a Mabushi 540 and the gearing won't cost much, the potentiometer need to be a stereo so that cost nothing too, at the end, i don't think it will cost a lot more than a used wheel and the main work, the piceless work will be the correct programming of the Arduino to monitor and pilot the Dc Motor.
Thank you for your post and have a good day !! (or night... ;D)
i just read your post and there's a way that i'm gonna explore and that what i described earlier and what you say in here, i'm first start from a old FFB wheel and attach it to the existing axis of my rig. Then see what happen.
But as far as i tried FFB on the wheel playing GP Bikes (full FFB not just the centering) i didn't like the all-shake stuff, probably need to be tune but it's not what i'm searching for the most.
The centering, one more time, i don't care, but the fact that it forces against you when leaning, that thing i want. And i'm gonna do.
But after that, yes, feeling harder when braking to lean, that will be an outcome since it's the main feeling to turn on a bike while braking.
And starting from a wheel that i "operate" to extract what i need is a good and easy idea, but in middle terms, i'd like to reproduce the rig for my youngest son ( they both are motorcycle riders too, like Daddy !!), who badly wants to ride too on GP Bikes with other thing than just the pad. So, it would be nice to understand and be able to reproduce. And if it's not that complex, give it to DD so he can add it to his HSx system.
At the same time, i hope you gonna reach your point and get what you want, but it's been 25 yrs almost that i'm playing Motorcycle game (GP500 mostly) on a Pc so i decided that at 50 yrs old, i could make my own complete stuff, i keep my old wheel safe and can use it if necessary but i don't want a "middle" solution. But i understand your choice and whish its gonna work nicely as you want it.
i found old wheel for a few € (20) and sure it's cheap. But an Arduino like plus a Mabushi 540 and the gearing won't cost much, the potentiometer need to be a stereo so that cost nothing too, at the end, i don't think it will cost a lot more than a used wheel and the main work, the piceless work will be the correct programming of the Arduino to monitor and pilot the Dc Motor.
Thank you for your post and have a good day !! (or night... ;D)
Title: Re: Project Realistic Rig
Post by: doubledragoncc on April 17, 2018, 09:38:41 AM
Post by: doubledragoncc on April 17, 2018, 09:38:41 AM
I have been toying with a unit to mount on car systems too. Here is my original setup for development from 2010 with G27
https://www.youtube.com/v/JDhvXkO_vZA
If I remember right I had it set to 40 degrees rotation not sure.
DD
https://www.youtube.com/v/JDhvXkO_vZA
If I remember right I had it set to 40 degrees rotation not sure.
DD
Title: Re: Project Realistic Rig
Post by: speedfr on April 17, 2018, 11:27:16 AM
Post by: speedfr on April 17, 2018, 11:27:16 AM
i've seen that for a long time, that's the first "contact" with IASystems.
I did the same with a big wood stick to give it a try, that was... special !!
This week-end, i'll go pick up the used wheel i found and i start the work. I'll tell you after. :)
I did the same with a big wood stick to give it a try, that was... special !!
This week-end, i'll go pick up the used wheel i found and i start the work. I'll tell you after. :)
Title: Re: Project Realistic Rig
Post by: poumpouny on April 17, 2018, 12:13:26 PM
Post by: poumpouny on April 17, 2018, 12:13:26 PM
The problem is that in normal mode, the FFB is attached to the lean input/output and every bike movement is sent to the wheel, that's why it is unnaturally shaky, in order to get the right feeling on the handle bar (like in real life) it have to be attached to the handlebar steering, and the only way for you to do such is to use Direct Steer with Angle (DSA). in DSA mode the handle bar only "shake" when you handlebar shake or wooble like in real life, and you have the handlebar countering you when you lean, and you really have to counter steer on each corner. But riding in DSA/DST mode is another challenge ......
Title: Re: Project Realistic Rig
Post by: Vini on April 17, 2018, 01:51:02 PM
Post by: Vini on April 17, 2018, 01:51:02 PM
while it may work ok with a wheel, DSA mode wouldn't feel right with a (swinging) handlebar controller because the handlebar will no longer represent the bike lean angle, ruining the immersion (it would remain at 0 lean most of the time).
as i said from the start, if you want to do it properly you need two axis, one for lean angle (output only) and one in DSA mode with GPB's FFB.
so you would need two wheel motors.
as i said from the start, if you want to do it properly you need two axis, one for lean angle (output only) and one in DSA mode with GPB's FFB.
so you would need two wheel motors.
Title: Re: Project Realistic Rig
Post by: racer73 on April 17, 2018, 02:55:00 PM
Post by: racer73 on April 17, 2018, 02:55:00 PM
Hi all,
I've been lurking here for a couple of months and been impressed by the incredible talents on display here. I'm currently waiting on a rig from dd and am very excited to try it out. I decided to chime in here because I may have a perspective that is useful to the current discussion. I have had no experience whatsoever with racing games or simulators. I am a motorcycle racer and due to our long winters here in Canada I've been interested in putting together a motorcycle simulator that will provide me some practice and diversion during the non-racing seasons. I'm sure there are plenty of racers on the forum who have different takes on this than me. I'm just throwing in my 2 cents.
In response to speedfr's discussion relating to "try to go back to center and at the same time maintain the pressure on both sides give back this perfect feeling"
I'll use resistance to counter-steer (rcs) to describe that feeling that opposes counter-steer or the tendency for the bike to stay moving in the direction it is currently going. That feeling is strongest when you're initiating a change to the direction of the bike. The greater the change needed the more input force needs to be applied. As you lean the bike over and reach the desired lean angle that push-back feel is greatly diminished. So much so that once the desired lean angle is reached the amount of rider input into the handlebars should be 0. The bike will now follow the new line that was set. The bike needs no additional input whatsoever to keep the lean and therefore the rcs feel should be 0. When riders describe the need to keep pressure on the handlebars when leaned over it's often the case that they are unintentionally loading the other side of the handlebar. Then when exiting the turn and standing the bike back up the rcs felt on the "outside" end of the handlebar is strong and then diminishes as the bike returns to an upright position.
rcs will be strongest when the desired lean angle (dla) is the greatest distance from the current lean angle (cla). rcs = abs(cla-dla) The rcs should be felt on the side of the handlebar that is initiating the counter-steer (i.e. the pushing hand)
To me this is VERY different than a steering wheel. When initiating a turn with a steering wheel you generally feel the same pressure on the wheel and once you're in the turn you constantly feel the same pressure so when you release the wheel or ease up on your grip the wheel wants to return to the center position.
To simulate rcs you would need some kind of mechanical means to have the pressure be greatest at initiation and then diminish as the chosen lean angle is approached. I'm sure dd or speedfr could come up with something cool.
Ok... back to my lurker position. ;)
I've been lurking here for a couple of months and been impressed by the incredible talents on display here. I'm currently waiting on a rig from dd and am very excited to try it out. I decided to chime in here because I may have a perspective that is useful to the current discussion. I have had no experience whatsoever with racing games or simulators. I am a motorcycle racer and due to our long winters here in Canada I've been interested in putting together a motorcycle simulator that will provide me some practice and diversion during the non-racing seasons. I'm sure there are plenty of racers on the forum who have different takes on this than me. I'm just throwing in my 2 cents.
In response to speedfr's discussion relating to "try to go back to center and at the same time maintain the pressure on both sides give back this perfect feeling"
I'll use resistance to counter-steer (rcs) to describe that feeling that opposes counter-steer or the tendency for the bike to stay moving in the direction it is currently going. That feeling is strongest when you're initiating a change to the direction of the bike. The greater the change needed the more input force needs to be applied. As you lean the bike over and reach the desired lean angle that push-back feel is greatly diminished. So much so that once the desired lean angle is reached the amount of rider input into the handlebars should be 0. The bike will now follow the new line that was set. The bike needs no additional input whatsoever to keep the lean and therefore the rcs feel should be 0. When riders describe the need to keep pressure on the handlebars when leaned over it's often the case that they are unintentionally loading the other side of the handlebar. Then when exiting the turn and standing the bike back up the rcs felt on the "outside" end of the handlebar is strong and then diminishes as the bike returns to an upright position.
rcs will be strongest when the desired lean angle (dla) is the greatest distance from the current lean angle (cla). rcs = abs(cla-dla) The rcs should be felt on the side of the handlebar that is initiating the counter-steer (i.e. the pushing hand)
To me this is VERY different than a steering wheel. When initiating a turn with a steering wheel you generally feel the same pressure on the wheel and once you're in the turn you constantly feel the same pressure so when you release the wheel or ease up on your grip the wheel wants to return to the center position.
To simulate rcs you would need some kind of mechanical means to have the pressure be greatest at initiation and then diminish as the chosen lean angle is approached. I'm sure dd or speedfr could come up with something cool.
Ok... back to my lurker position. ;)
Title: Re: Project Realistic Rig
Post by: Vini on April 17, 2018, 09:19:05 PM
Post by: Vini on April 17, 2018, 09:19:05 PM
You need an electric motor that is controlled by GPB' force-feedback in DSA mode for realistic behaviour. A purely mechanical system would not work because it cannot take into account the grip levels of the tyres (e.g. the rear sliding and introducing additional forces on the steering).
Title: Re: Project Realistic Rig
Post by: speedfr on April 17, 2018, 09:20:41 PM
Post by: speedfr on April 17, 2018, 09:20:41 PM
DSA, DST, i tried them, couldn't do more than 5m without falling, nightmare, but simple : i have no idea of what it means in terms of interaction between rider and the bike.
But i understand that's by using the "real" torque on the axle of the bike.
And if it's that a copy of reality, my first draw should correspond but as i said, it's "another world", i wanted to have a handlebar that works, not as real, but that could give me the possibility to ride GP bikes and have fun. i'm almost there.
Language doesn't help and to be more politically correct, i would say that if i was better in English i surely understand more than what i can sneak here and there.
Language about all this thing, specially the DSA-DST is obviously technic and my English is "everyday" not technic. and worse, sites like Google Translate are super bad in technical language so ...
it's "my" problem so i'll finally find out one day, i use my mind to glue the puzzle of what i understand mostly...
i was maried 15y to a girl from Mill Valley (near SFO) so i can speak and read. But i never had discussion about epicycloidal train or the setup of a distribution belt.... I'm sure you all get it ;D i didn't learn technical words but she gaves me two beautiful kids that rides like Daddy ! :)
In long terms, at least on the princip side, i will work on my first idea after, specially practicing GP Bikes with another system ie my bad copy of DD's invention. ;)
So yes, Vini, two motors for the both axles, and one that blocks the vertical one around 35-40km/h, only there to block the steering and shake as a wooble when Melandri hits the 5 and 6 gear (still did that in Aragon, incredible how he set his bike up, dont get it... ).
And the other one to send you the gyroscopic effect plus gravity on leaning, and all the effect that a bike gives you.
It's not in the idea to change anything about GP Bike, it's to try the best to get the closest possible to what a bike gives you when you ride it, so i could focus on trajectoire and braking, i mean on what is interesting.
When you forget about UI and controller, that mean they are adapted to what you do. That's my not-secret-at-all goal.
If FFB is able to send that back to the rider then ok. But if FFB is like they are in car games mostly shaking to gives you sensations without any correspondance to the reality, i'll forget. But Poumpouny seems to say it's really that... we'll see maybe one day.
Hello racer73,
Welcome aboard, happy that your first message falls in here.
Always happy to see a Canuck (!!!) around, one day maybe, i'll tell you about the French Canadian Beaver Licker team and the Beaver's Motorcycle Club, if my pal from Gore Bay shows up...
Most of the crazy guys here are riding IRL and for some, pads are ok, but for the older like me, we need more. If you bought an HS3 from DD, you'll soon know what i mean. But even if DD's work is great and unique, i'm sure you're gonna miss some sensation.
Anyway, even with the best simulator ever, you'll never have gravity, inertia, gyroscopic and others even if they are exact IN the software, for us it's not "the same" and it won't ever be.
it's a Sisyphe story, trying to reach, to move towards an ideal horizon...
Hope to see you on track online soon. 8)
But i understand that's by using the "real" torque on the axle of the bike.
And if it's that a copy of reality, my first draw should correspond but as i said, it's "another world", i wanted to have a handlebar that works, not as real, but that could give me the possibility to ride GP bikes and have fun. i'm almost there.
Language doesn't help and to be more politically correct, i would say that if i was better in English i surely understand more than what i can sneak here and there.
Language about all this thing, specially the DSA-DST is obviously technic and my English is "everyday" not technic. and worse, sites like Google Translate are super bad in technical language so ...
it's "my" problem so i'll finally find out one day, i use my mind to glue the puzzle of what i understand mostly...
i was maried 15y to a girl from Mill Valley (near SFO) so i can speak and read. But i never had discussion about epicycloidal train or the setup of a distribution belt.... I'm sure you all get it ;D i didn't learn technical words but she gaves me two beautiful kids that rides like Daddy ! :)
In long terms, at least on the princip side, i will work on my first idea after, specially practicing GP Bikes with another system ie my bad copy of DD's invention. ;)
So yes, Vini, two motors for the both axles, and one that blocks the vertical one around 35-40km/h, only there to block the steering and shake as a wooble when Melandri hits the 5 and 6 gear (still did that in Aragon, incredible how he set his bike up, dont get it... ).
And the other one to send you the gyroscopic effect plus gravity on leaning, and all the effect that a bike gives you.
It's not in the idea to change anything about GP Bike, it's to try the best to get the closest possible to what a bike gives you when you ride it, so i could focus on trajectoire and braking, i mean on what is interesting.
When you forget about UI and controller, that mean they are adapted to what you do. That's my not-secret-at-all goal.
If FFB is able to send that back to the rider then ok. But if FFB is like they are in car games mostly shaking to gives you sensations without any correspondance to the reality, i'll forget. But Poumpouny seems to say it's really that... we'll see maybe one day.
Quote from: racer73 on April 17, 2018, 02:55:00 PMGreat idea !!
Hi all,
... I'm currently waiting on a rig from dd and am very excited to try it out.
Quote from: racer73 on April 17, 2018, 02:55:00 PMThis could be a fortune actually, i always thought that more than one brain on a problem is not a solution but THE best solution. So, stick your ass in here !!
I'm just throwing in my 2 cents.
Quote from: racer73 on April 17, 2018, 02:55:00 PMi cannot be more ok with you. Perfect and so real.
So much so that once the desired lean angle is reached the amount of rider input into the handlebars should be 0. .... The bike will now follow the new line that was set. The bike needs no additional input whatsoever to keep the lean and therefore the rcs feel should be 0
Quote from: racer73 on April 17, 2018, 02:55:00 PMGod, i whish...
To simulate rcs you would need some kind of mechanical means to have the pressure be greatest at initiation and then diminish as the chosen lean angle is approached. I'm sure dd or speedfr could come up with something cool.
Hello racer73,
Welcome aboard, happy that your first message falls in here.
Always happy to see a Canuck (!!!) around, one day maybe, i'll tell you about the French Canadian Beaver Licker team and the Beaver's Motorcycle Club, if my pal from Gore Bay shows up...
Most of the crazy guys here are riding IRL and for some, pads are ok, but for the older like me, we need more. If you bought an HS3 from DD, you'll soon know what i mean. But even if DD's work is great and unique, i'm sure you're gonna miss some sensation.
Anyway, even with the best simulator ever, you'll never have gravity, inertia, gyroscopic and others even if they are exact IN the software, for us it's not "the same" and it won't ever be.
it's a Sisyphe story, trying to reach, to move towards an ideal horizon...
Hope to see you on track online soon. 8)
Title: Re: Project Realistic Rig
Post by: racer73 on April 18, 2018, 12:19:59 PM
Post by: racer73 on April 18, 2018, 12:19:59 PM
Thanks speedfr for the kind welcome. We Canadians are certainly fond of our beaver ;) so I hope to hear about "the French Canadian Beaver Licker team and the Beaver's Motorcycle Club" sometime.
As for the simulator... I don't have any unrealistic expectations. Things like gravity, inertia, and gyroscopic effects are extremely difficult or impossible to duplicate (at least within our budgets). Winters here are too long and the riding season too short so having a nice system that gives me a general realistic feel where I can practice things like hitting my reference markers as well as some fun racing will fulfill my needs quite nicely.
With regard to that rcs feel... I was thinking about it a bit more. There used to be fitness machines called Nautilus that had a gear system whereby at the start and end of the movement (where presumably the user was weakest) the resistance was the least. And as they reached the center of the movement the load would become the greatest. I'm wondering if something like that could be used in this application. However we would want the greatest resistance at the start of the counter-steer.
My general feeling is that when counter-steering I want to feel that rcs the most when I'm pushing the hardest and as I decrease my input the rcs should diminish proportionately. Almost like it's reflecting my input pressure back at me. (But a bit less so that the bars actually move. ;) )
And as you mention, much of this seems like a Sisyphean task, but every once and a while we get a boulder to the top. :)
As for the simulator... I don't have any unrealistic expectations. Things like gravity, inertia, and gyroscopic effects are extremely difficult or impossible to duplicate (at least within our budgets). Winters here are too long and the riding season too short so having a nice system that gives me a general realistic feel where I can practice things like hitting my reference markers as well as some fun racing will fulfill my needs quite nicely.
With regard to that rcs feel... I was thinking about it a bit more. There used to be fitness machines called Nautilus that had a gear system whereby at the start and end of the movement (where presumably the user was weakest) the resistance was the least. And as they reached the center of the movement the load would become the greatest. I'm wondering if something like that could be used in this application. However we would want the greatest resistance at the start of the counter-steer.
My general feeling is that when counter-steering I want to feel that rcs the most when I'm pushing the hardest and as I decrease my input the rcs should diminish proportionately. Almost like it's reflecting my input pressure back at me. (But a bit less so that the bars actually move. ;) )
And as you mention, much of this seems like a Sisyphean task, but every once and a while we get a boulder to the top. :)
Title: Re: Project Realistic Rig
Post by: speedfr on April 29, 2018, 08:32:05 PM
Post by: speedfr on April 29, 2018, 08:32:05 PM
Hello riders !
Here is a little update.
Adding the FFB parts from the wheel i disassembly, the "rig" is almost finished but the main is done.
I changed the seat for a real bike seat, pictures coming, as the other one was stopping blood or nerves on my both legs and it started to be dangerous.
Yesterday night, trying things, i went to the "Onboard" server of Vini (Vin97) and thought that the MotoGP 2017 were going to be unridable, absolutly too powerfull, cuz trying the MMX500 or the Moto2 was super hard.
I did a lot of Moto3, that was fun an easy but not fast enough as you all know.
So i went there without any special hopes, finding the riding easier with the handlebar but still hard to place my bike wherever i wanted too.
And then the light went on me.
This light is named Vin97, he gave me good tips about setting the view, which i already try to work on but without great success.
But now, it's completly different.
This Vin97 changed my GP Bikes experience by his know-how and i had a super evening riding MotoGP on Brno, that was a blast.
I've reached the GP500 feeling that i had 20 yrs ago.
As he says (and i was desperate to reach), now it's "easy" to catch "Lorenzo lines" and lick the corners. Great, great, great.
@Vini ==> Danke von ganzem Herzen.
I wanted to thank him again so much, and for that i taped on OBS some of the runs.
But OBS did an update just before and maybe my bad, but all my settings went away...
So the video is in very poor quality, 25fps on 1080p. I tried all afternoon to cut this video for the best part and "glue" it together, VLC doesn't work well enough (delay in the sound on the output video), tried several "free" software, that mostly doesn't work, even with a flv converted to mp4, so i finally dropped and decided to put the raw video like it is.
For the record.
And at the end, there's a special Easter Egg...
Next video will be cleaner, as the other ones i've done on my YT channel, and it will come with full explanation.
@DD : i ride without any springs now, FFB is off but the steering system constantly fight me except when i have a line of angle, so its a lot more "realistic" than springs.
I'll show you on the coming video.
Now, it will be nice to find out how to hide this system under the steering head but that's to have something to do at night otherwise, i just sleep, pffff.... ;D
So far, i noticed this 3 points :
_Why the MMX500 have trouble gearing down, it looks like a "gear saver" that refuse to gear down too fast... :o
_Why the clutch on Moto 3 is asking you to constantly accelerate otherwise you stall... :-X
_And the last but not least, why can't we split ambiant sound (other bike) from our bike ? Very disturbing, and that's the next thing with 64bits managment that i'm gonna stick in the whishlist.
(and the first one who answer me "because its like that in real life" i will tell him that in real life you feel your RPM by the vibration of the bike, here it doesn't vibrate so it's kind of "guessing" situation).
Next will be to ask a guy who know how to design so i could order a Bee frame (Black and Yellow) with number 40 on top and the brand of my bike : Sapetoku
(i'll explain later why ;D but for the French guy who are old enough, just remenber Gaston Lagaffe)
Journey at Vin97's Academy !
https://www.youtube.com/v/HqwTXQCnE3M
Here is a little update.
Adding the FFB parts from the wheel i disassembly, the "rig" is almost finished but the main is done.
I changed the seat for a real bike seat, pictures coming, as the other one was stopping blood or nerves on my both legs and it started to be dangerous.
Yesterday night, trying things, i went to the "Onboard" server of Vini (Vin97) and thought that the MotoGP 2017 were going to be unridable, absolutly too powerfull, cuz trying the MMX500 or the Moto2 was super hard.
I did a lot of Moto3, that was fun an easy but not fast enough as you all know.
So i went there without any special hopes, finding the riding easier with the handlebar but still hard to place my bike wherever i wanted too.
And then the light went on me.
This light is named Vin97, he gave me good tips about setting the view, which i already try to work on but without great success.
But now, it's completly different.
This Vin97 changed my GP Bikes experience by his know-how and i had a super evening riding MotoGP on Brno, that was a blast.
I've reached the GP500 feeling that i had 20 yrs ago.
As he says (and i was desperate to reach), now it's "easy" to catch "Lorenzo lines" and lick the corners. Great, great, great.
@Vini ==> Danke von ganzem Herzen.
I wanted to thank him again so much, and for that i taped on OBS some of the runs.
But OBS did an update just before and maybe my bad, but all my settings went away...
So the video is in very poor quality, 25fps on 1080p. I tried all afternoon to cut this video for the best part and "glue" it together, VLC doesn't work well enough (delay in the sound on the output video), tried several "free" software, that mostly doesn't work, even with a flv converted to mp4, so i finally dropped and decided to put the raw video like it is.
For the record.
And at the end, there's a special Easter Egg...
Next video will be cleaner, as the other ones i've done on my YT channel, and it will come with full explanation.
@DD : i ride without any springs now, FFB is off but the steering system constantly fight me except when i have a line of angle, so its a lot more "realistic" than springs.
I'll show you on the coming video.
Now, it will be nice to find out how to hide this system under the steering head but that's to have something to do at night otherwise, i just sleep, pffff.... ;D
So far, i noticed this 3 points :
_Why the MMX500 have trouble gearing down, it looks like a "gear saver" that refuse to gear down too fast... :o
_Why the clutch on Moto 3 is asking you to constantly accelerate otherwise you stall... :-X
_And the last but not least, why can't we split ambiant sound (other bike) from our bike ? Very disturbing, and that's the next thing with 64bits managment that i'm gonna stick in the whishlist.
(and the first one who answer me "because its like that in real life" i will tell him that in real life you feel your RPM by the vibration of the bike, here it doesn't vibrate so it's kind of "guessing" situation).
Next will be to ask a guy who know how to design so i could order a Bee frame (Black and Yellow) with number 40 on top and the brand of my bike : Sapetoku
(i'll explain later why ;D but for the French guy who are old enough, just remenber Gaston Lagaffe)
Journey at Vin97's Academy !
https://www.youtube.com/v/HqwTXQCnE3M
Title: Re: Project Realistic Rig
Post by: speedfr on May 10, 2018, 10:53:53 PM
Post by: speedfr on May 10, 2018, 10:53:53 PM
@DD : After what you wrote in the GP Bikes video topic, here is what i had to do because regular FFB is made for a wheel and our handlebars are a lot wider so it forces like hell and is not strong enough. In addition, the DC motor gets super mega hot and i'm afraid everything is going to smoke dark...
So, since we have 3D Printers, i went to change the gearing for the DC Motor to the main axe and try to give it more forces to fight the handlebar torque.
1. The white is the original, Module 0.75, one 22, one 100 that gives torque to a end one, module 0.75 in 22 teeth.
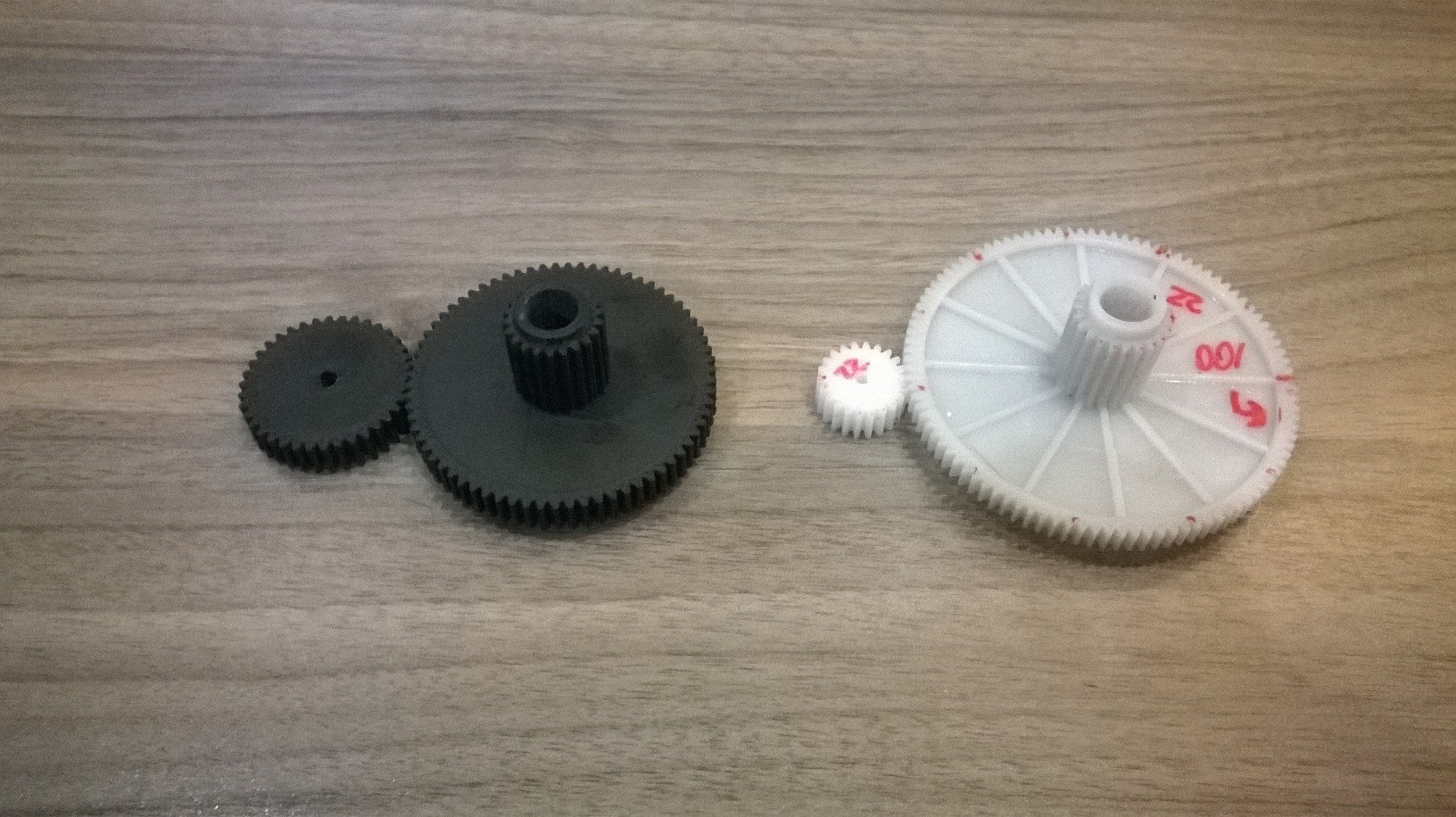
2. The one i did are module 0.8 one 38 et one 70, and the center one is still 0.75 module in 22 teeth also.
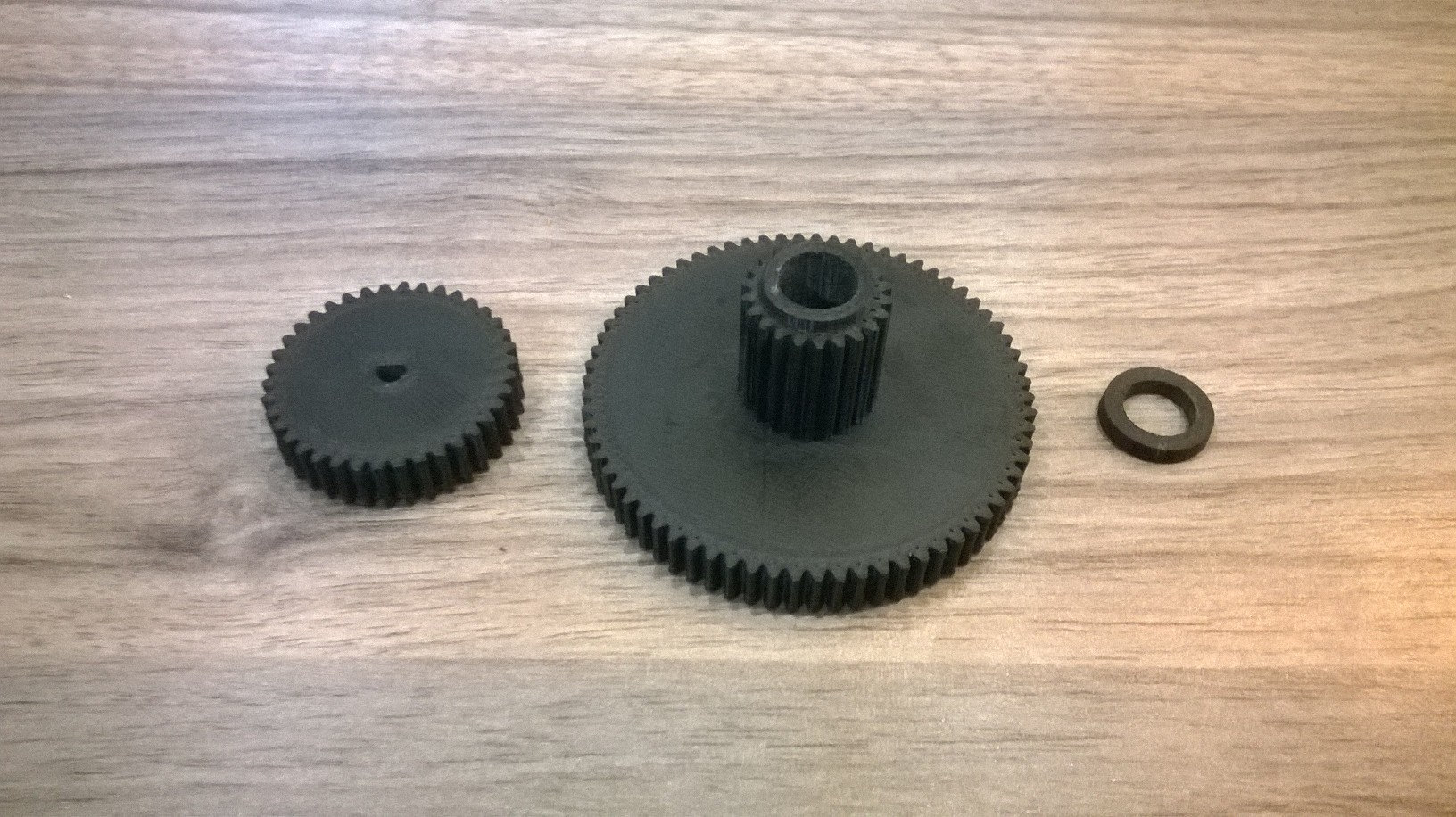
3. The original
4. How it looks without the FFB gearing

5. After mounting my own production :)

Ans so at the end, the FFB is stronger and you feel it a lot more. I set the dynamic down and the static more agressiv, and that gives good sensations, specially when braking while entering a curve.
I'll do the video, but not until minimum one week cuz i'm waiting for some parts first specially Yellow 3D filament, but with this kind of "Gruyere" week we have, it takes longer.
So, since we have 3D Printers, i went to change the gearing for the DC Motor to the main axe and try to give it more forces to fight the handlebar torque.
1. The white is the original, Module 0.75, one 22, one 100 that gives torque to a end one, module 0.75 in 22 teeth.
2. The one i did are module 0.8 one 38 et one 70, and the center one is still 0.75 module in 22 teeth also.
3. The original
4. How it looks without the FFB gearing
5. After mounting my own production :)
Ans so at the end, the FFB is stronger and you feel it a lot more. I set the dynamic down and the static more agressiv, and that gives good sensations, specially when braking while entering a curve.
I'll do the video, but not until minimum one week cuz i'm waiting for some parts first specially Yellow 3D filament, but with this kind of "Gruyere" week we have, it takes longer.
Title: Re: Project Realistic Rig
Post by: speedfr on May 16, 2018, 08:49:29 PM
Post by: speedfr on May 16, 2018, 08:49:29 PM
Quote from: h106frp on April 15, 2018, 03:02:04 PM
You need a dll to link into GPB (dlo) and place the data in memory (the easy bit surprisingly, you can do it with codeblocks C) then some sort of host PC application to send this data to the arduino at a decent rate.
The host application also lets you scale the values, range check and limit (a must if you do not want the bars going berserk) and the ability to drive other stuff like a dash. I used microchip PIC and USB.
Hello there !
Coming back on h106frp words, i found that...

That will be a perfect device to FFB the both axis, X for steering as an example and Y for leaning.
That takes us back to my first post design. And if i understand well enough, that could be the good friend for DSA or DST (but mostly angle measuring than torque, because i'm thinking of potentiometers and not torque system) and then go closer to reality.
But there's a question... : Is GPB able to separate the axis in the FFB response ?
Does somebody has a answer for that ?
Will it be possible to"filter" FFB to avoid the wooble and shaking all the ways at it does with full FFB on ? i'm not running with FFB, just the fact that the axis is cinstantly trying to go back to center (which is not like a bike at all but...).
Each time i tried to work on FFB behavior, the soft i found are not working (Forcetest, simFFB) and if i put the FFB on in the "Settings" panel, when you gear up, it shakes, when you have woobles, it shakes and it's too much affecting the behavior of the handelbar. If i reduced enough not to feel it, i don't feel the handlebar "grinding" anymore... like a dog who try to byte his own tail...
So if anybody tried this kind of system or knows better about what GBP can/can't do, i'll be more than happy to continue my Graal quest ! ;D
Title: Re: Project Realistic Rig
Post by: h106frp on May 16, 2018, 09:31:02 PM
Post by: h106frp on May 16, 2018, 09:31:02 PM
The output will supply a lean angle and a steer angle that are the product of your steer input.
Essentially;
you just send the lean angle to your rig roll axis - nothing more to do there
the steer output will go to your steer servo and by adjusting the servo controller steer torque to something comfortable you get your force feedback. As you push or pull on the bars it creates an error in the servo centering so the output from the potentiometer supplies both the game controller input and feedback measurement for the servo controller which will be trying to set the bars to the angle set by GPB to close the loop (so a resultant force to oppose) - it all works surprisingly well. I would recommend you take a look at hall devices for the feedback pots as you need these to be noise free with good resolution, I described some cheap home made ones in my controller post.
You will need physical limit stops and limit switches to operate safely! The forces and response speed of decent servo drives are considerable - not sure if you have seen my test video of a rig in motion?
From experience you may find you need an electronic servo brake/snubber that will prevent back emf from the servo motor tripping the over voltage on the switch mode supply output and it also improves the servo dynamics, its basically a big capacitor and a comparator circuit driving a MOSFET switch to a load resistor.
Essentially;
you just send the lean angle to your rig roll axis - nothing more to do there
the steer output will go to your steer servo and by adjusting the servo controller steer torque to something comfortable you get your force feedback. As you push or pull on the bars it creates an error in the servo centering so the output from the potentiometer supplies both the game controller input and feedback measurement for the servo controller which will be trying to set the bars to the angle set by GPB to close the loop (so a resultant force to oppose) - it all works surprisingly well. I would recommend you take a look at hall devices for the feedback pots as you need these to be noise free with good resolution, I described some cheap home made ones in my controller post.
You will need physical limit stops and limit switches to operate safely! The forces and response speed of decent servo drives are considerable - not sure if you have seen my test video of a rig in motion?
From experience you may find you need an electronic servo brake/snubber that will prevent back emf from the servo motor tripping the over voltage on the switch mode supply output and it also improves the servo dynamics, its basically a big capacitor and a comparator circuit driving a MOSFET switch to a load resistor.
Title: Re: Project Realistic Rig
Post by: speedfr on May 16, 2018, 10:12:59 PM
Post by: speedfr on May 16, 2018, 10:12:59 PM
@h106frp : Many thanks for the reply and yes, i've been through the entire post before i started my rig with Allan MTE parts and design instead of what i had in mind at first. And after i draw the first principle, i went to go through your entire topic, and realized you were doing it, but language barrier, complex concept in specialized or slang texts put me out fast so each time, i'm sneaking what i can understand, but i'm too far away to be sure of the question i have to ask... But if i could, i would ;D
Your answer might be super clear but ...
Hall devices instead of potentiometers ? is that it ?
And what i don't understand is if you steer at first, let's say out of your pit box, then around 50ish km/h, the torque on the vertical axis (Y) will increase and block this axis so if you counter-steer on the handlebar, the horizontal axis (X) will get more free; the X servo will be "ordered" to let go more. How can it be read by the arduino, send to the Pc, and interpret by GPB, then goes back to the both servo motor, constantly to give you the bike sensation...
I mean, once you connect a servo motor to each axis and design the "monster", you have to use a card to drive the shield or mosfet for the motor (DC ? pwm ? step-by-step ? <- these are powerfull) and to be connected to the USB port. Then you go in the settings, after putting DSA active in the .ini file i guess.
But can you assign X and Y to the leaning and steering axis ? And the reading and sending instructions to the card to drive the servomotor is already there in GPB ? What are we suppose to do to connect the "monster" to the game and it runs like a charm ?
You see, i'm full of question and a little bit stubborn when i'm looking for something. Anyway thank you for all the times you spend answering me. I'm gonna go through your video and topic again, try to catch more of it.
Edit : Why limit switch ? physical limit as on a real bike but why a electric signal ? For what device ? to cut the DC motor ? i don't get it... sorry.
What is it that you call "emf" ? And actually i don't get a word of the entire sentence... i can see you talk about over voltage and improving the way the servo motor acts... but why a load resistor appear ? like a load cell ? i'm kind of lost in here :-[
Your answer might be super clear but ...
Hall devices instead of potentiometers ? is that it ?
And what i don't understand is if you steer at first, let's say out of your pit box, then around 50ish km/h, the torque on the vertical axis (Y) will increase and block this axis so if you counter-steer on the handlebar, the horizontal axis (X) will get more free; the X servo will be "ordered" to let go more. How can it be read by the arduino, send to the Pc, and interpret by GPB, then goes back to the both servo motor, constantly to give you the bike sensation...
I mean, once you connect a servo motor to each axis and design the "monster", you have to use a card to drive the shield or mosfet for the motor (DC ? pwm ? step-by-step ? <- these are powerfull) and to be connected to the USB port. Then you go in the settings, after putting DSA active in the .ini file i guess.
But can you assign X and Y to the leaning and steering axis ? And the reading and sending instructions to the card to drive the servomotor is already there in GPB ? What are we suppose to do to connect the "monster" to the game and it runs like a charm ?
You see, i'm full of question and a little bit stubborn when i'm looking for something. Anyway thank you for all the times you spend answering me. I'm gonna go through your video and topic again, try to catch more of it.
Edit : Why limit switch ? physical limit as on a real bike but why a electric signal ? For what device ? to cut the DC motor ? i don't get it... sorry.
What is it that you call "emf" ? And actually i don't get a word of the entire sentence... i can see you talk about over voltage and improving the way the servo motor acts... but why a load resistor appear ? like a load cell ? i'm kind of lost in here :-[
Title: Re: Project Realistic Rig
Post by: h106frp on May 16, 2018, 11:08:51 PM
Post by: h106frp on May 16, 2018, 11:08:51 PM
Easy ones first :)
A hall effect device senses magnetic fields and ouputs a signal representing this. The device in my post will sense the field direction passing through it from a magnet so as the field rotates it will give a very accurate proportional volage.
The problem with potentiometers using a DC supply is they tend to output a very noisy signal, wear quickly with repeated rotations and are prone to mechanical failure in this type of application.
My home made device;
https://www.xsimulator.net/community/threads/home-made-hall-effect-pot.7203/ (https://www.xsimulator.net/community/threads/home-made-hall-effect-pot.7203/)
Hall devices instead of potentiometers ? is that it ? Yes :)
The mechanical stops are physical limits to how far your rig will rotate to stop you breaking your wrists. If you get any sort of problem with either the output from GPB or your equipment you must prevent excessive rotation of the rig. The limit switches (microswitches) are pretty much a standard item to interface to the controller and give a 'soft' limit control and should activate before the mechanical limits.
Back EMF occurs when you suddenly reverse or stop the field on the drive motors. As the magnnetic field collapses it generates a large reverse voltage spike (the same way an ignition coil works to drive a high voltage to a spark plug) which will appear across the power supply. Switch mode supplies (like a PC power pack) usually have an over voltage cut out sensor that will activate and cause you power supply to operate eratically. The snubber circuit absorbs the back EMF spike before it can disturb the power supply.
The axis of your drive motors should use GPB output of lean and steer as their target positions. Any influence you add at the bars are then used as the input to the game and the control loop will be closed. This would be the most simple system similar to most commercial controllers and is our basic building block
If you want to build a torque based system you will need to incorporate a seperate torque sensor in the steer column. This would then become the control input to the game so instead of forcing a change in controller deflection you would apply a torque and allow GPB to calculate the new angles for the servo position.
The closed loop nature of control input to calculated bike and steer rotation automatically creates the steer solution. The values from GPB fed to your servos automatically adjust to the external influence created by the rider through speed and steer input. You need to think in ths 'closed loop' way even if it appears contradictory at first it will make sense once you get started.
GPB only outputs the calculated values - you must write your own code to drive the servo controllers. I used a PIC micro and analogue output chips to supply a scaled DC voltage to drive the servo position.
So.
DLO to get the values from GPB and into memory
A visual C program to grab thhe values from memory, scale them and send them by USB to
A PIC micro that outputs suitable control voltages to the servo controllers
Dedicated servo controllers that have limit switch, torque control and PID
24 volt servo motors with worm drive gearboxes
Hall effect feedback/position sensors
Provision for torque sensing in the steer column
Steering damper on the steer axis to limit violent oscillations :o
Hve you checked out;
https://www.xsimulator.net/community/ (https://www.xsimulator.net/community/)
You could try simtools - this should simplify the programming aspects
https://www.xsimulator.net/community/marketplace/gp-bikes-plugin.53/ (https://www.xsimulator.net/community/marketplace/gp-bikes-plugin.53/)
So it can be made to work and is intended for arduino and H bridge card
A hall effect device senses magnetic fields and ouputs a signal representing this. The device in my post will sense the field direction passing through it from a magnet so as the field rotates it will give a very accurate proportional volage.
The problem with potentiometers using a DC supply is they tend to output a very noisy signal, wear quickly with repeated rotations and are prone to mechanical failure in this type of application.
My home made device;
https://www.xsimulator.net/community/threads/home-made-hall-effect-pot.7203/ (https://www.xsimulator.net/community/threads/home-made-hall-effect-pot.7203/)
Hall devices instead of potentiometers ? is that it ? Yes :)
The mechanical stops are physical limits to how far your rig will rotate to stop you breaking your wrists. If you get any sort of problem with either the output from GPB or your equipment you must prevent excessive rotation of the rig. The limit switches (microswitches) are pretty much a standard item to interface to the controller and give a 'soft' limit control and should activate before the mechanical limits.
Back EMF occurs when you suddenly reverse or stop the field on the drive motors. As the magnnetic field collapses it generates a large reverse voltage spike (the same way an ignition coil works to drive a high voltage to a spark plug) which will appear across the power supply. Switch mode supplies (like a PC power pack) usually have an over voltage cut out sensor that will activate and cause you power supply to operate eratically. The snubber circuit absorbs the back EMF spike before it can disturb the power supply.
The axis of your drive motors should use GPB output of lean and steer as their target positions. Any influence you add at the bars are then used as the input to the game and the control loop will be closed. This would be the most simple system similar to most commercial controllers and is our basic building block
If you want to build a torque based system you will need to incorporate a seperate torque sensor in the steer column. This would then become the control input to the game so instead of forcing a change in controller deflection you would apply a torque and allow GPB to calculate the new angles for the servo position.
The closed loop nature of control input to calculated bike and steer rotation automatically creates the steer solution. The values from GPB fed to your servos automatically adjust to the external influence created by the rider through speed and steer input. You need to think in ths 'closed loop' way even if it appears contradictory at first it will make sense once you get started.
GPB only outputs the calculated values - you must write your own code to drive the servo controllers. I used a PIC micro and analogue output chips to supply a scaled DC voltage to drive the servo position.
So.
DLO to get the values from GPB and into memory
A visual C program to grab thhe values from memory, scale them and send them by USB to
A PIC micro that outputs suitable control voltages to the servo controllers
Dedicated servo controllers that have limit switch, torque control and PID
24 volt servo motors with worm drive gearboxes
Hall effect feedback/position sensors
Provision for torque sensing in the steer column
Steering damper on the steer axis to limit violent oscillations :o
Hve you checked out;
https://www.xsimulator.net/community/ (https://www.xsimulator.net/community/)
You could try simtools - this should simplify the programming aspects
https://www.xsimulator.net/community/marketplace/gp-bikes-plugin.53/ (https://www.xsimulator.net/community/marketplace/gp-bikes-plugin.53/)
So it can be made to work and is intended for arduino and H bridge card
Title: Re: Project Realistic Rig
Post by: poumpouny on May 17, 2018, 07:22:41 AM
Post by: poumpouny on May 17, 2018, 07:22:41 AM
I'm still persuaded that a 2 Axis steering / Leaning controlled by you hand IS NOT the solution, as i sayed in the first page, the problem is that you will realise it, only when you finished your project and trying to ride with it. In real life, you input the steer angle with your hand (not the leaning, just the steering) the it result in the leaning angle. Then you make the bike balance with you entire body (starting the bike, changing direction, braking, making wheelie etc .....) you are not leaning with you body (2nd axis with you controller) (yes but a very little input so it is negligeable) you just balance the bike. IMHO, the best far yet solution is a steering axis (with FFB), coupled to a head tracking device. The best demonstration of that is try to ride in DST or DSA with a FFB wheel and an Head tracking device, you really mimic your realife position when starting the bike, balancing the bike with you body movement .
Title: Re: Project Realistic Rig
Post by: h106frp on May 17, 2018, 08:30:47 AM
Post by: h106frp on May 17, 2018, 08:30:47 AM
I completely agree. :)
The roll axis on my rig was only intended as feedback and has significant holding torque applied from the controller (hence the big servo and worm drive), you will not move it as an input.
It was always intended to simulate normal/counter steering type input hence the extra torque sensing strain gauges on the steeering stem. :)
Many years ago I had a trustmaster bars conntroller which allowed both axis to move but you could only select 1 as input - a horrible system that felt nothing like a motorcycle control
The roll axis on my rig was only intended as feedback and has significant holding torque applied from the controller (hence the big servo and worm drive), you will not move it as an input.
It was always intended to simulate normal/counter steering type input hence the extra torque sensing strain gauges on the steeering stem. :)
Many years ago I had a trustmaster bars conntroller which allowed both axis to move but you could only select 1 as input - a horrible system that felt nothing like a motorcycle control
Title: Re: Project Realistic Rig
Post by: speedfr on May 17, 2018, 01:34:22 PM
Post by: speedfr on May 17, 2018, 01:34:22 PM
I still have this old thrusmaster bike controller... its in the attic now taking dust for years, even my sons didn't want that piece of s... ;D
Thank you h106frp for the long explanation.
I think i understand now the loop concept of input/output through the reading of the GPB value (a little bit as a simmanager system or Motec) but yes, it needs programming both ways, to catch the value and to interpret them correctly...
The good thing is you define yourself the value, the axis and the response. Great idea.
I thought maybe GPB was able to dispatch the output to the servomotor if X and Y was binded in the settings but that was "the regular" FFB and yes, all the shaking are going to come with.
Your system (if i understand well) catch only the steering/leaning info and forget about the rest which is perfect.
But it requires a lot of DIY in domains that i'm away from.
I'll look at that with my electronician friend when i'll be able to, but i think its going to be a long term work.
And Poumpouny, even if i seat on the bike seat and have the same "attitude" when riding GPB, i'm never gonna lean on the side in my office, i'm gonna finish on the floor after a while for sure, so the best is to simulate the feelings in hands not in the entire body, and with this well known feeling i can adapt my driving in the screen.
Otherwise you need a GPlean system with hydraulic actuator and it's not what i can/want/will do in DIY.
Thanks again guys, need to dig more on this way to go for that. :o
edit :
@h106frp :
you had to install a steering damper as on a real bike to avoid the woobles effect ?
What is it that you call "provision" for torque sensing ? are you saying that you are going to add a torque sensor later on ?
The "good" Arduino to use is the Leonardo which is detected as a native joystick by Windows ?
Thank you h106frp for the long explanation.
I think i understand now the loop concept of input/output through the reading of the GPB value (a little bit as a simmanager system or Motec) but yes, it needs programming both ways, to catch the value and to interpret them correctly...
The good thing is you define yourself the value, the axis and the response. Great idea.
I thought maybe GPB was able to dispatch the output to the servomotor if X and Y was binded in the settings but that was "the regular" FFB and yes, all the shaking are going to come with.
Your system (if i understand well) catch only the steering/leaning info and forget about the rest which is perfect.
But it requires a lot of DIY in domains that i'm away from.
I'll look at that with my electronician friend when i'll be able to, but i think its going to be a long term work.
And Poumpouny, even if i seat on the bike seat and have the same "attitude" when riding GPB, i'm never gonna lean on the side in my office, i'm gonna finish on the floor after a while for sure, so the best is to simulate the feelings in hands not in the entire body, and with this well known feeling i can adapt my driving in the screen.
Otherwise you need a GPlean system with hydraulic actuator and it's not what i can/want/will do in DIY.
Thanks again guys, need to dig more on this way to go for that. :o
edit :
@h106frp :
you had to install a steering damper as on a real bike to avoid the woobles effect ?
What is it that you call "provision" for torque sensing ? are you saying that you are going to add a torque sensor later on ?
The "good" Arduino to use is the Leonardo which is detected as a native joystick by Windows ?
Title: Re: Project Realistic Rig
Post by: h106frp on May 17, 2018, 03:05:36 PM
Post by: h106frp on May 17, 2018, 03:05:36 PM
I added the steering damper to take out some of the sudden deflections by adding a bit of resistance to work against the servo. Using powerful servos you can get quite a large shock loading through the steer feedback which is very unpleasant, another option would be to add some averaging or damping in the interface software. The system I built is very powerful, the steer servo (small one) would easily bend a 6mm high tensile screw used in the physical stop system.
I used strain gauges on the steering stem for torque sensing :) (I do this sort of stuff for work)
Any controller that has the USB protocol as a software library would be the way to go - its quite fiddly on the windows side when you need to send data to the device.
I used strain gauges on the steering stem for torque sensing :) (I do this sort of stuff for work)
Any controller that has the USB protocol as a software library would be the way to go - its quite fiddly on the windows side when you need to send data to the device.
Title: Re: Project Realistic Rig
Post by: speedfr on May 17, 2018, 04:25:14 PM
Post by: speedfr on May 17, 2018, 04:25:14 PM
ok, but usually the devices that comes with Com port and a kind of Prolific driver, it's a mess, last time that happen with the AT2560 from my 3D printer, never been able to control the printer through USB whatever i did or change the driver. Nothing. On 2 different machines so that's why Leobodnar or Leonardo are good for me cuz they connect and are active right away.
I understand you are an electronician or electrotechnician.
And filtering the feeback from GPB is exactly what i tried to do with simFFb or Testforce but it seems that it only works with DirectX Input device so one solution will be to use X360CE.
I'll continue digging !!!
"Obviously my rig ambition outweighs my capacities..." ;D
I understand you are an electronician or electrotechnician.
And filtering the feeback from GPB is exactly what i tried to do with simFFb or Testforce but it seems that it only works with DirectX Input device so one solution will be to use X360CE.
I'll continue digging !!!
"Obviously my rig ambition outweighs my capacities..." ;D
Title: Re: Project Realistic Rig
Post by: speedfr on May 18, 2018, 10:03:36 PM
Post by: speedfr on May 18, 2018, 10:03:36 PM
Coming back to a "regular" simple axis device with no FFB, here is a "teaser" for the coming-soon video, my "bike" is ready. ;D

Title: Re: Project Realistic Rig
Post by: speedfr on May 21, 2018, 03:26:23 PM
Post by: speedfr on May 21, 2018, 03:26:23 PM
Hello to who ever follows that topic.
And the rest too but they won't know it ;D
@h106frp (and DD or other if interested) :
As i realize and wrote in humoristic way (at least on my side), my rig ambition need more capabilities than i have so, even if the princip is probalby the closest to what i'm looking for, i'm gonna do as in Rugby, i'm gonna avoid the problem to turn around it. ;)
And start from what i have, a leaning device, no steering ok, but at the speed we're going steering doesn't count that much.
Starting from that fact, the thing i'm looking for is what the FFB does when i'm riding and how to implement it BUT keep my leaning though the Leo Bodnar because it's in 12bits, so it is a lot more accurate than any regular wheel that you reduce from 900° or even 270° rotation angle to something like 60°.
When you do so, you loose a lot of accuracy and i've been struggling for a week or two with that.
And decide to come back to Leo Bodnar for the leaning instead of the wheel potentiometer reading and it's simple, really simple :
At Imola, on Moto2, 1.56 best ever time with the wheel reading and one time or two maxi, impossible to reproduce and do 3 laps without falling.
Using the Leo Bornar reading, 1.51 right away and constantly around 1.52, doing 15 laps without a crash...
It says the thing by itself.
So, i went to the Whishlist and put a new topic : filtering FFB in case i'll go for a FFB wheel adapted to the rig one day but i actually didn't use the FFB cuz it shakes constantly and the shaking is not really smooth or smoothable (!!) i mean you cannot set that and it's too strong. Feels like riding a electric Buffalo in Las Vegas where you have to stay the longest possible on it...
So for now FFB is out the circuit.
So, there's is your solution h106frp but it requires programming and good electronics capacities that i don't have. I'm a IT guy but mostly a "computer mechanic" nothing to do with programming, the only code i "own" was TurboPascal to set the fabulous Num760T for digital milling machine. But it was 25y ago and programming was on carboard ;D
Then, i decide to find "my" solutions that will not go to the both axis for now.
Keep the rig as it is and trying to find better.
And here is what i found and gonna do :
1. add a second potentiometer to the end of the rig (the solid part attached to the desk) to read my angle position.
2. putting that into a chip (something like a Arduino) so the Arduino will order through a H interface a DC motor to constantly go against the angle. Meaning if i go right, he is forcing left, and keeping the angle i set. Forcing both ways constantly.
That's not hard to do and my electronician friend is already doing the plan of the part i'll need and how to link them between themselves.
Second thing is a increase of the strength from the DC motor as soon as i brake. So, using the stop light switch on the front brake to command the DC motor with more opposition force until the brake are released.
That solutions requires parts but almost nothing to program (Arduino kind of things are easy to program with a GUI system) and DC Motor as a Mabushi 575 is cheap, easy to find, the power supply will be a laptop one, 19v at 4.5A that will be enough. And i can 3D print the gearing to give the motor enough torque.
This system is completly independant, doesn't need to be hook to the Pc, doesn't need driver or reading from GPB, doesn't need to "steal" the info from the game and doesn't interfere with whatever from the Leo Bordnar so no risk of surge or high current going back to the USB card.
So, yes, h106frp, i know it's an "average" solution, not the top one as you did with you rig. But at least on the paper, it's easy, cheap and simple to do. And to reproduce (i reminds you that i have to do a second rig for Mister William that keeps jumping on mine as soon as he can).
So the video will come later cuz the SAPETOKU #40 is at the workshop 8)
And the rest too but they won't know it ;D
@h106frp (and DD or other if interested) :
As i realize and wrote in humoristic way (at least on my side), my rig ambition need more capabilities than i have so, even if the princip is probalby the closest to what i'm looking for, i'm gonna do as in Rugby, i'm gonna avoid the problem to turn around it. ;)
And start from what i have, a leaning device, no steering ok, but at the speed we're going steering doesn't count that much.
Starting from that fact, the thing i'm looking for is what the FFB does when i'm riding and how to implement it BUT keep my leaning though the Leo Bodnar because it's in 12bits, so it is a lot more accurate than any regular wheel that you reduce from 900° or even 270° rotation angle to something like 60°.
When you do so, you loose a lot of accuracy and i've been struggling for a week or two with that.
And decide to come back to Leo Bodnar for the leaning instead of the wheel potentiometer reading and it's simple, really simple :
At Imola, on Moto2, 1.56 best ever time with the wheel reading and one time or two maxi, impossible to reproduce and do 3 laps without falling.
Using the Leo Bornar reading, 1.51 right away and constantly around 1.52, doing 15 laps without a crash...
It says the thing by itself.
So, i went to the Whishlist and put a new topic : filtering FFB in case i'll go for a FFB wheel adapted to the rig one day but i actually didn't use the FFB cuz it shakes constantly and the shaking is not really smooth or smoothable (!!) i mean you cannot set that and it's too strong. Feels like riding a electric Buffalo in Las Vegas where you have to stay the longest possible on it...
So for now FFB is out the circuit.
So, there's is your solution h106frp but it requires programming and good electronics capacities that i don't have. I'm a IT guy but mostly a "computer mechanic" nothing to do with programming, the only code i "own" was TurboPascal to set the fabulous Num760T for digital milling machine. But it was 25y ago and programming was on carboard ;D
Then, i decide to find "my" solutions that will not go to the both axis for now.
Keep the rig as it is and trying to find better.
And here is what i found and gonna do :
1. add a second potentiometer to the end of the rig (the solid part attached to the desk) to read my angle position.
2. putting that into a chip (something like a Arduino) so the Arduino will order through a H interface a DC motor to constantly go against the angle. Meaning if i go right, he is forcing left, and keeping the angle i set. Forcing both ways constantly.
That's not hard to do and my electronician friend is already doing the plan of the part i'll need and how to link them between themselves.
Second thing is a increase of the strength from the DC motor as soon as i brake. So, using the stop light switch on the front brake to command the DC motor with more opposition force until the brake are released.
That solutions requires parts but almost nothing to program (Arduino kind of things are easy to program with a GUI system) and DC Motor as a Mabushi 575 is cheap, easy to find, the power supply will be a laptop one, 19v at 4.5A that will be enough. And i can 3D print the gearing to give the motor enough torque.
This system is completly independant, doesn't need to be hook to the Pc, doesn't need driver or reading from GPB, doesn't need to "steal" the info from the game and doesn't interfere with whatever from the Leo Bordnar so no risk of surge or high current going back to the USB card.
So, yes, h106frp, i know it's an "average" solution, not the top one as you did with you rig. But at least on the paper, it's easy, cheap and simple to do. And to reproduce (i reminds you that i have to do a second rig for Mister William that keeps jumping on mine as soon as he can).
So the video will come later cuz the SAPETOKU #40 is at the workshop 8)
Title: Re: Project Realistic Rig
Post by: speedfr on July 05, 2018, 05:38:55 PM
Post by: speedfr on July 05, 2018, 05:38:55 PM
Hello everybody,
coming back to you to expose few questions (DD, h106frp and Uberslug) and explaining which and how i'm going to upgrade my rig to have better feelings (still my biggest problem, that i have to "interpret" the effect in my mind and for somebody who is riding everyday, it's kind of loosing me on GP bikes).
@h106frp
@UberSlug
At first, this is for both of you :
I post in here two draws, representing a real frame with what i call the V axis (steering with rake angle) and the H axis (leaning).
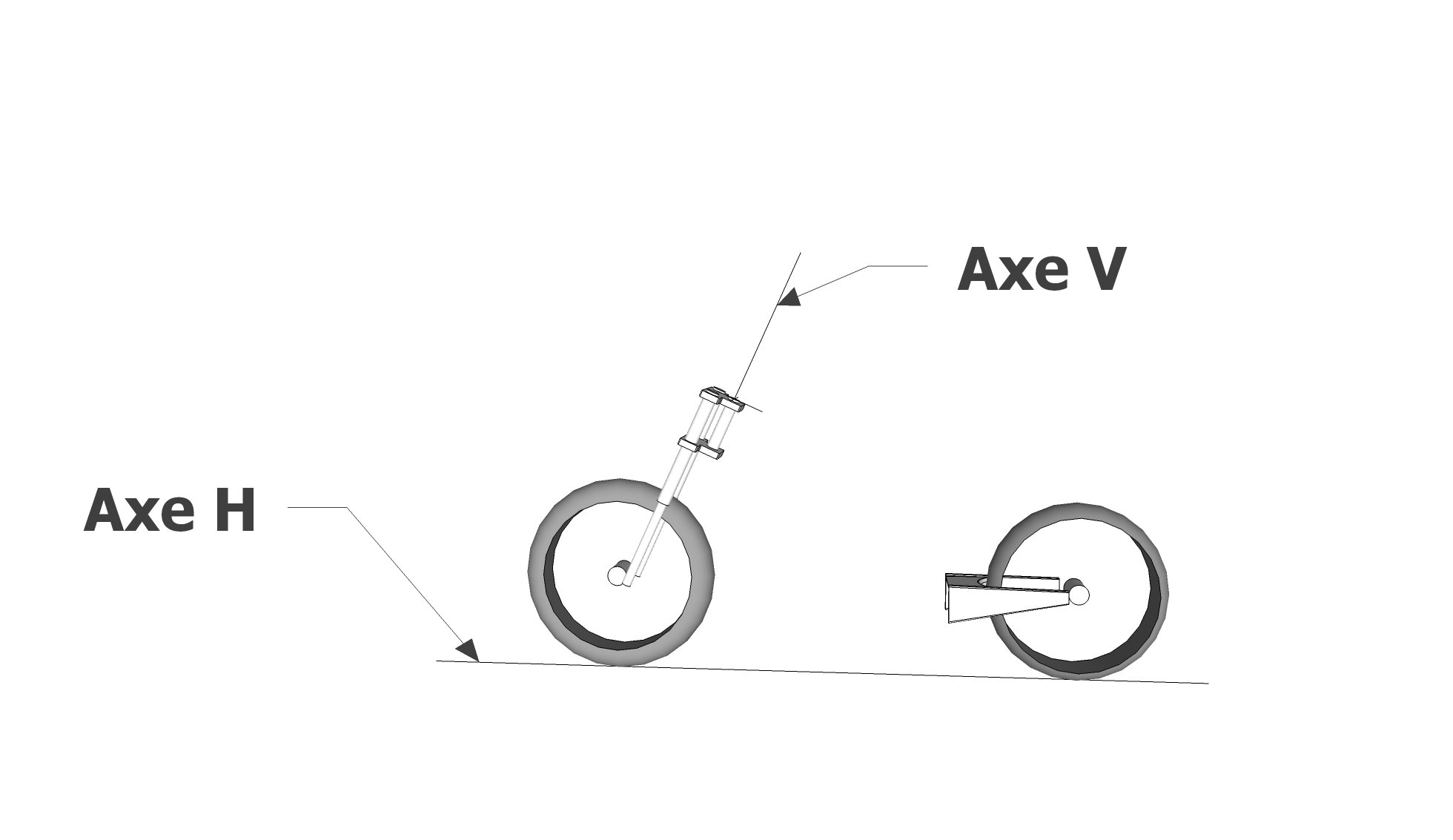
Then, if i had to reproduce that axis, as my first post mention it with a picture from Sketchup, i would do my V and H axis like that : (maybe put a 20-25° angle for the V axis to be more realistic)
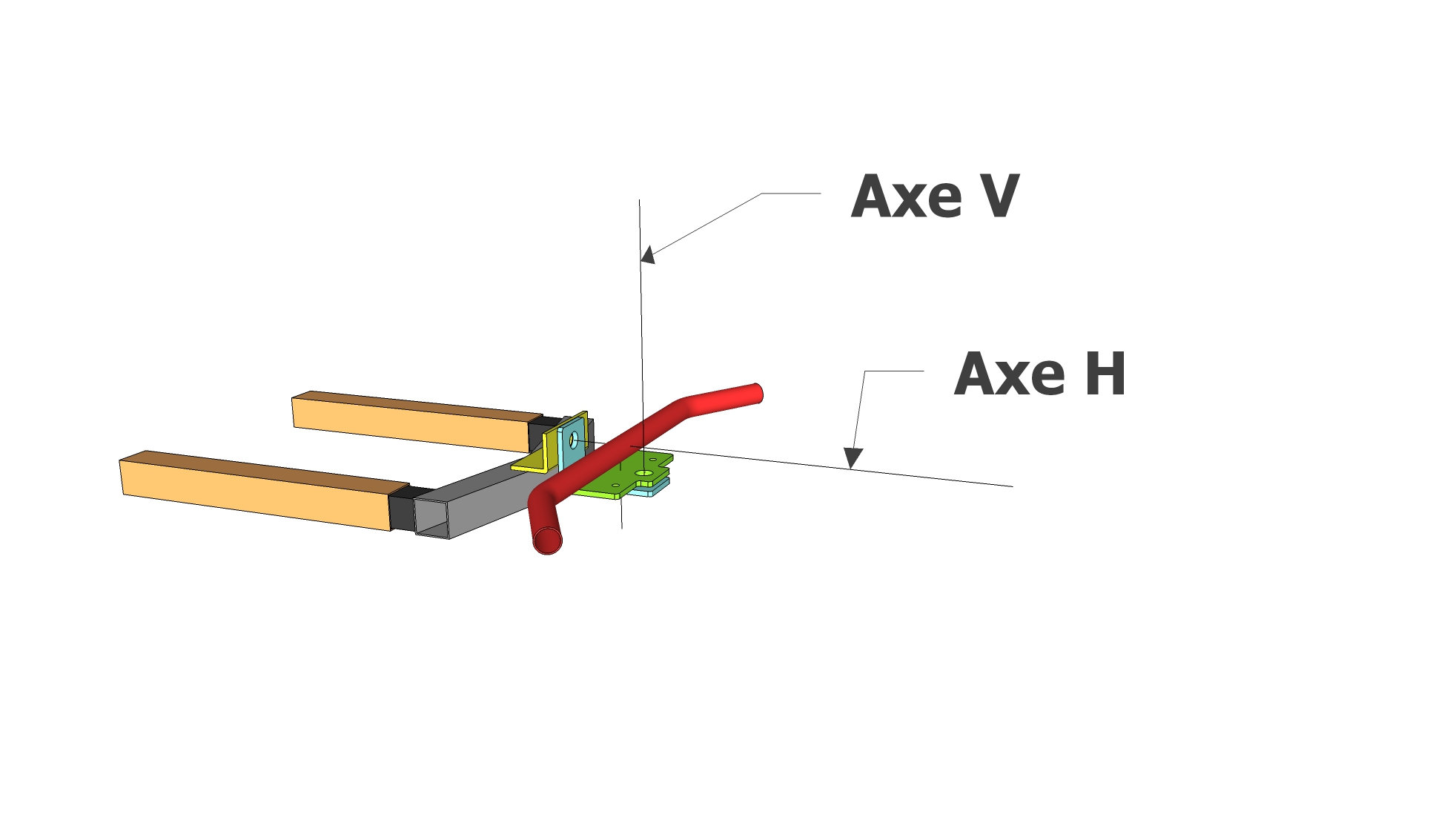
My question is simple :
How you guys can use (via DST for UberSlug or DSA for H106frp) both axis at the same time on GP Bikes who only can use 1 axis (leaning or steering but only one displays in setting) even if Hardcore mode sets the DSA/DST.
So, how you guys can pick this mouvement from either V or H, if the axis in the game is linked to V axis (steering).
Actually, you can read your V and H position through potentiometers (regular or Hall effect doesn't matter)
and after that, the game can only read one of the both axis... So i guess you read the V axis and by pushing (countersteering)the H axis, you lean. But where do you input the H axis value ????
I understood that h106frp "catches" the value from a dll software that can read what the game is sending to USB device in terms of FFB but i'm scratching my head trying to find how the value you get goes back to GP Bikes...
@Both of you : UberSlug, you catch the V axis with your SimExp systems but how do you lean and read this leaning to send it to the game ? Or is leaning an interpretation of your steering angle (torque instead).
Same question for h106frp : you have two ServoMotor, ok, but only one is used to be read by the game (through your Hall effect potentiometer) but how the leaning is being interpreted by GP Bikes ? I will required a load cell to mesure the torque but then it becomes DST and even, you have to add Potentiometers+Loadcell reading to catch the total value, i'm sorry guys, i don't get it.
Might be simple and right in front of me..but i'm blind so far. Thanks in advance.
Now, second subject, the upgrade.
I tryed again with a steering wheel that has FFB.
FFB is good but not filtered and that's annoying.
But...
But i found out with my eletrotechnician friend, that we could actually catch this FFB AND filter it.
Solution is called Leonardo Arduino, 32u4 chip inside, and by replacing the LeoBodnar i have, i could use it for the 5 axis (Throttle, F brake, R Brake, Clutch and Steering) and have the 15 buttons i have on the LeoBodnar.
The thing is, this chip can be known as a HID device natively by Windows and uses a virtual com port.
And through the com port, i could read the FFB and Filter it nicely to get only the leaning/steering effect and nothing about gear up and down or kerbs vibration. Which is what i'm looking for. (in the whishlist i ask to get FFB filtered, only davidboda46 came to say +1 so i guess we are from another planet ;D )
The rest of my rig remains the same, it's ready anyway, and what i'm missing (feelings from the track) will come with a 3D printed gearings and a couple of 24v DC motor+360W-24v PowerSupply.
And yes, h106frp, we experienced so EMF so it's all filtered by some diode now, don't ask me its my friend who measure and did everything related to electronics.
I have a H bridge already (43 Amp !!) and everything runs fine at the test with the DC motor.
Here is a little capture of the princip of gearing in order to get a 1:58 reduced gearing to have sufficient torque to feel something (FFB wheels have usually a 1:30 ratio and if 1:58 is not enough i could increase easely to 1:104).
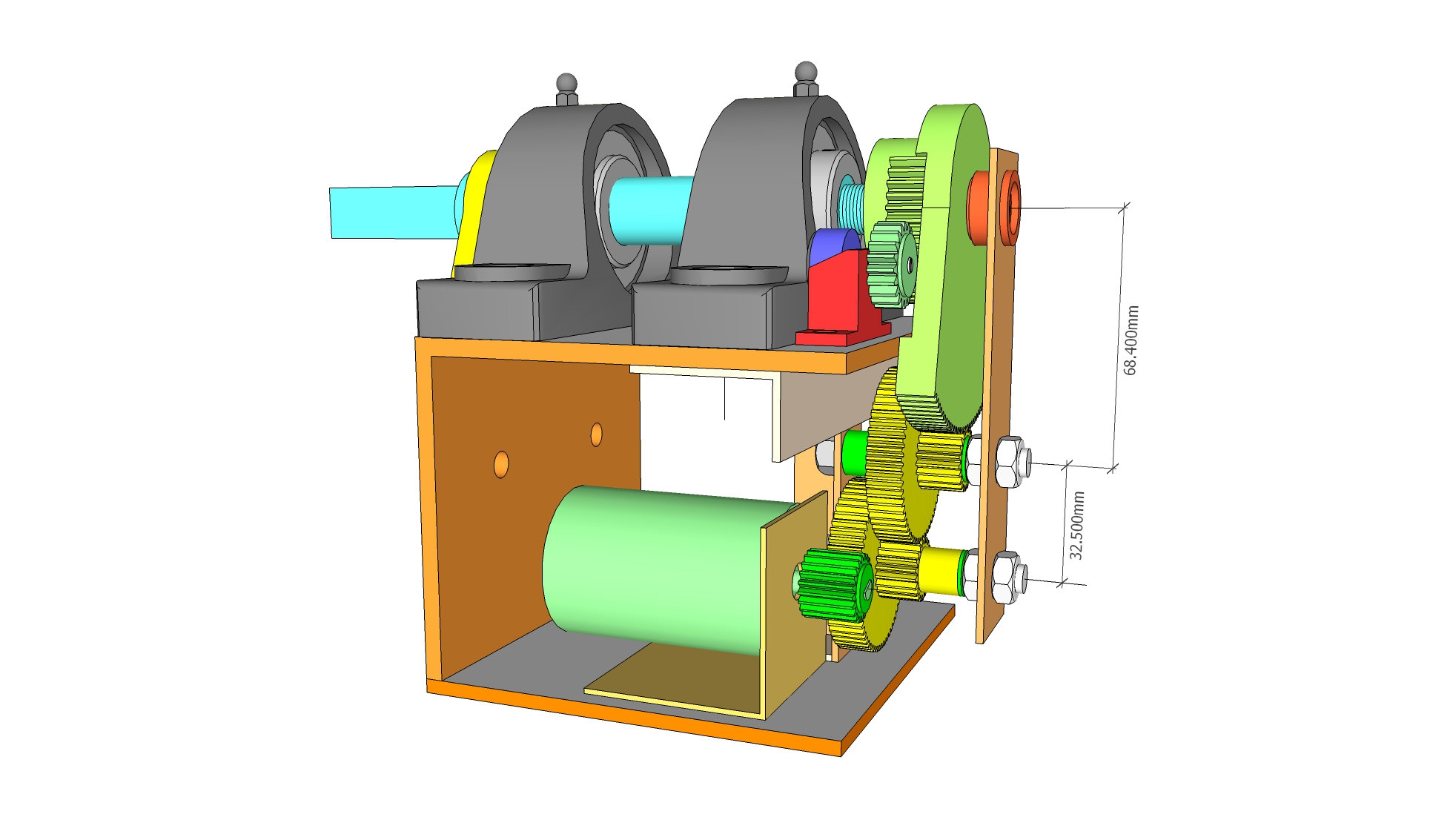
I really hope into that because feelings from the track is what i miss the most. 2 sec on inattention and you are away from the line, away from the time and pissed off.
So now, rig is going to the garage and being worked on, i hope i'm back on the track within 2 weeks.
coming back to you to expose few questions (DD, h106frp and Uberslug) and explaining which and how i'm going to upgrade my rig to have better feelings (still my biggest problem, that i have to "interpret" the effect in my mind and for somebody who is riding everyday, it's kind of loosing me on GP bikes).
@h106frp
@UberSlug
At first, this is for both of you :
I post in here two draws, representing a real frame with what i call the V axis (steering with rake angle) and the H axis (leaning).
Then, if i had to reproduce that axis, as my first post mention it with a picture from Sketchup, i would do my V and H axis like that : (maybe put a 20-25° angle for the V axis to be more realistic)
My question is simple :
How you guys can use (via DST for UberSlug or DSA for H106frp) both axis at the same time on GP Bikes who only can use 1 axis (leaning or steering but only one displays in setting) even if Hardcore mode sets the DSA/DST.
So, how you guys can pick this mouvement from either V or H, if the axis in the game is linked to V axis (steering).
Actually, you can read your V and H position through potentiometers (regular or Hall effect doesn't matter)
and after that, the game can only read one of the both axis... So i guess you read the V axis and by pushing (countersteering)the H axis, you lean. But where do you input the H axis value ????
I understood that h106frp "catches" the value from a dll software that can read what the game is sending to USB device in terms of FFB but i'm scratching my head trying to find how the value you get goes back to GP Bikes...
@Both of you : UberSlug, you catch the V axis with your SimExp systems but how do you lean and read this leaning to send it to the game ? Or is leaning an interpretation of your steering angle (torque instead).
Same question for h106frp : you have two ServoMotor, ok, but only one is used to be read by the game (through your Hall effect potentiometer) but how the leaning is being interpreted by GP Bikes ? I will required a load cell to mesure the torque but then it becomes DST and even, you have to add Potentiometers+Loadcell reading to catch the total value, i'm sorry guys, i don't get it.
Might be simple and right in front of me..but i'm blind so far. Thanks in advance.
Now, second subject, the upgrade.
I tryed again with a steering wheel that has FFB.
FFB is good but not filtered and that's annoying.
But...
But i found out with my eletrotechnician friend, that we could actually catch this FFB AND filter it.
Solution is called Leonardo Arduino, 32u4 chip inside, and by replacing the LeoBodnar i have, i could use it for the 5 axis (Throttle, F brake, R Brake, Clutch and Steering) and have the 15 buttons i have on the LeoBodnar.
The thing is, this chip can be known as a HID device natively by Windows and uses a virtual com port.
And through the com port, i could read the FFB and Filter it nicely to get only the leaning/steering effect and nothing about gear up and down or kerbs vibration. Which is what i'm looking for. (in the whishlist i ask to get FFB filtered, only davidboda46 came to say +1 so i guess we are from another planet ;D )
The rest of my rig remains the same, it's ready anyway, and what i'm missing (feelings from the track) will come with a 3D printed gearings and a couple of 24v DC motor+360W-24v PowerSupply.
And yes, h106frp, we experienced so EMF so it's all filtered by some diode now, don't ask me its my friend who measure and did everything related to electronics.
I have a H bridge already (43 Amp !!) and everything runs fine at the test with the DC motor.
Here is a little capture of the princip of gearing in order to get a 1:58 reduced gearing to have sufficient torque to feel something (FFB wheels have usually a 1:30 ratio and if 1:58 is not enough i could increase easely to 1:104).
I really hope into that because feelings from the track is what i miss the most. 2 sec on inattention and you are away from the line, away from the time and pissed off.
So now, rig is going to the garage and being worked on, i hope i'm back on the track within 2 weeks.
Title: Re: Project Realistic Rig
Post by: HornetMaX on July 05, 2018, 07:12:05 PM
Post by: HornetMaX on July 05, 2018, 07:12:05 PM
You can't have at the same time steering torque (or steering angle) and target bike lean as GPB inputs. It just doesn't make any sense physically.
Bike lean is an output of the physical model and steering torque is the only real input.
In GPB normal mode (not DST, not DSA) you input taget bike lean (note, this is not the bike lean) and steering torque is computed by the virtual rider.
In GPB DSA you input steering angle and steering torque is computed by the virtual rider.
In GPB DST you input steering torque (and the virtual rider doesn't do anything).
In any case, bike lean s an output of the physical model.
Bike lean is an output of the physical model and steering torque is the only real input.
In GPB normal mode (not DST, not DSA) you input taget bike lean (note, this is not the bike lean) and steering torque is computed by the virtual rider.
In GPB DSA you input steering angle and steering torque is computed by the virtual rider.
In GPB DST you input steering torque (and the virtual rider doesn't do anything).
In any case, bike lean s an output of the physical model.
Title: Re: Project Realistic Rig
Post by: h106frp on July 05, 2018, 08:16:08 PM
Post by: h106frp on July 05, 2018, 08:16:08 PM
Great to see your rig developing but Max has correctly summarised the control options and without using the plugin dlo interface your options are limited. When using GPBs force feedback output you are dependant on PBs estimation of how the bars would 'feel' for the rider. It may be possible to suggest that the interface could be enhanced with some sort of parameter 'mixer' to customise the output feel for the rider.
Not something I have ever tried but the rumble output that Max created for MaxHUD would suggest that you could probably create your own force feedback signal from the dlo outputs and output it to the standard Microsoft HID control interface. If you asked him very nicely he might supply some guidance on hooking into the MaxHUD dlo/interface which would make things much easier.
My rig uses the lean and steer angles computed by the GPB physics engine to set the lean and steer angle of the 2 servo axis, i.e. the rig mimics what you would see in 1P view. The servos have considerable holding torque and 'set' these positions so they cannot be moved at the physical bar inputs.
DST mode which equates to full steering simulation.
The steering stem torque is used as the input to the game and is the product of how much effort (force not deflection) you are using at the physical bars to either oppose or add to the current steer torque set by the servo which will always attempt to maintain the currently computed steer angle, the closed loop nature of the control (via GPBs physics engine) does the rest of the computation work.
DSA mode which equates to a more complex force feedback system.
Optionally I can reduce the steer axis servo torque levels on the controller so that it behaves more like a traditional force feedback system allowing you to control the steering angle and use the feedback potentiometer (hall device in my case) as the input to the game.
Not something I have ever tried but the rumble output that Max created for MaxHUD would suggest that you could probably create your own force feedback signal from the dlo outputs and output it to the standard Microsoft HID control interface. If you asked him very nicely he might supply some guidance on hooking into the MaxHUD dlo/interface which would make things much easier.
My rig uses the lean and steer angles computed by the GPB physics engine to set the lean and steer angle of the 2 servo axis, i.e. the rig mimics what you would see in 1P view. The servos have considerable holding torque and 'set' these positions so they cannot be moved at the physical bar inputs.
DST mode which equates to full steering simulation.
The steering stem torque is used as the input to the game and is the product of how much effort (force not deflection) you are using at the physical bars to either oppose or add to the current steer torque set by the servo which will always attempt to maintain the currently computed steer angle, the closed loop nature of the control (via GPBs physics engine) does the rest of the computation work.
DSA mode which equates to a more complex force feedback system.
Optionally I can reduce the steer axis servo torque levels on the controller so that it behaves more like a traditional force feedback system allowing you to control the steering angle and use the feedback potentiometer (hall device in my case) as the input to the game.
Title: Re: Project Realistic Rig
Post by: speedfr on July 05, 2018, 09:42:48 PM
Post by: speedfr on July 05, 2018, 09:42:48 PM
Thanks for the reply so fast Max and h106frp. :)
Except that using your plugin, you collect his result. And then it can be interpreted. that's were i was lost, how a value can be picked and used if it cant be read.
I've seen your Plugin page and the result it gives. great and impressive job.
If racing was more developped in here, i'm sure it will be used more as on car races with Motec-likes.
And yes, you give a nice résumé of what it is, but i guess i'm gonna stick with option 1 for now even if the other ones are running somewhere in my mind. Later.
The feeling in the hands with FFB on the normal mode is not that great but it's there, better than not at all.
And so far it's not at all, very disturbing.
@h106frp, thanks for clearing up your rig invention to me, some point were confusing me. And that makes me write incoherent things sometimes. Specially in Shakespeare language ;D
And (but don't say that i told you 8) ) if i have to ask very nicely "with sugar on top" to Max, i'll do that on the right time, today will be wasting my last bullet ;)
If your rig catch what you push with your hand on the handlebar, it has to be very very small angles when being fast, and i guess the steering servo doesn't gives you a lot of frredom angle to do so... then the leaning servo turn the bar onto the H axis, and you "follow" the mouvement as on a real bike ?
And if i understand well, to use DST, it will need a loadcell on the V axis and a motor to countersteer this axis while "freeing" the H axis ?
all of that by reading the dlo output from GPB onto this H and V axis.
Am i good ?
And i think this is the only way to be able to slide on curve as in Moto2, when you see Aegerter, Lowes or Marquez steering at the end of a curve brake.
Real Sisyphe story, each time you think you reaching a point, you realise how far you are... :o
The story goes on.
Thanks again Messieurs !
Quote from: HornetMaX on July 05, 2018, 07:12:05 PMThanks because even if my expression is wrong way that's what i felt and i was confused about it. I know leaning is a result not an input (IRL).
You can't have at the same time steering torque (or steering angle) and target bike lean as GPB inputs. It just doesn't make any sense physically.
...
In any case, bike lean s an output of the physical model.
Except that using your plugin, you collect his result. And then it can be interpreted. that's were i was lost, how a value can be picked and used if it cant be read.
I've seen your Plugin page and the result it gives. great and impressive job.
If racing was more developped in here, i'm sure it will be used more as on car races with Motec-likes.
And yes, you give a nice résumé of what it is, but i guess i'm gonna stick with option 1 for now even if the other ones are running somewhere in my mind. Later.
The feeling in the hands with FFB on the normal mode is not that great but it's there, better than not at all.
And so far it's not at all, very disturbing.
@h106frp, thanks for clearing up your rig invention to me, some point were confusing me. And that makes me write incoherent things sometimes. Specially in Shakespeare language ;D
And (but don't say that i told you 8) ) if i have to ask very nicely "with sugar on top" to Max, i'll do that on the right time, today will be wasting my last bullet ;)
If your rig catch what you push with your hand on the handlebar, it has to be very very small angles when being fast, and i guess the steering servo doesn't gives you a lot of frredom angle to do so... then the leaning servo turn the bar onto the H axis, and you "follow" the mouvement as on a real bike ?
And if i understand well, to use DST, it will need a loadcell on the V axis and a motor to countersteer this axis while "freeing" the H axis ?
all of that by reading the dlo output from GPB onto this H and V axis.
Am i good ?
And i think this is the only way to be able to slide on curve as in Moto2, when you see Aegerter, Lowes or Marquez steering at the end of a curve brake.
Real Sisyphe story, each time you think you reaching a point, you realise how far you are... :o
The story goes on.
Thanks again Messieurs !
Title: Re: Project Realistic Rig
Post by: h106frp on July 05, 2018, 10:02:48 PM
Post by: h106frp on July 05, 2018, 10:02:48 PM
For DST mode the steering torque input is measured using strain gauges bonded directly to the steering stem so we are not measuring deflection but the force that we are applying at the bars to counter the servo action.
More modern electro-hydralic power steering systems with force feedback used for cars adopt a similar concept but use an electro magnetic transducer to deduce the torque - I did consider this as a possible steering stem solution using second hand ebay parts.
Using even a modest micro-controller and the servo controller closed loop adjustments you can easily keep up with the data rate from the GPB dlo interface.
I think you have pretty much grasped what I have tried to do; capture the counter-steering effect input by the rider and allow the resultant GPB physics engine output control everthing else :)
More modern electro-hydralic power steering systems with force feedback used for cars adopt a similar concept but use an electro magnetic transducer to deduce the torque - I did consider this as a possible steering stem solution using second hand ebay parts.
Using even a modest micro-controller and the servo controller closed loop adjustments you can easily keep up with the data rate from the GPB dlo interface.
I think you have pretty much grasped what I have tried to do; capture the counter-steering effect input by the rider and allow the resultant GPB physics engine output control everthing else :)
Title: Re: Project Realistic Rig
Post by: speedfr on July 06, 2018, 12:16:19 AM
Post by: speedfr on July 06, 2018, 12:16:19 AM
Quote from: h106frp on July 05, 2018, 10:02:48 PM
...capture the counter-steering effect input by the rider and allow the resultant GPB physics engine output control everthing else :)
And that's brillant !
Bravissimo.
Title: Re: Project Realistic Rig
Post by: speedfr on August 19, 2018, 11:02:32 AM
Post by: speedfr on August 19, 2018, 11:02:32 AM
Hello everybody,
back from a long bike trip in England and Wales (remember : the Welsh Road Race) and through France as well (4000km total) with Wifey, i found the seat i ordered to take place on my seat rig, where i put an old Peugeot 103 biplace seat but it's too hard and not wide enough for my old butt, so here it is :

I'm gonna place it later and anyway my rig is still undone (waiting for the electronics to be set for the FFB) and didn't tried yet the Beta 14 but i'm not in a hurry after what i read of bugs from Beta 14.
Crossed a lot of Mega-Goldwins heading to Ireland ::)
(this Polish guy has a tail and a side-car !!! )

;D
back from a long bike trip in England and Wales (remember : the Welsh Road Race) and through France as well (4000km total) with Wifey, i found the seat i ordered to take place on my seat rig, where i put an old Peugeot 103 biplace seat but it's too hard and not wide enough for my old butt, so here it is :
I'm gonna place it later and anyway my rig is still undone (waiting for the electronics to be set for the FFB) and didn't tried yet the Beta 14 but i'm not in a hurry after what i read of bugs from Beta 14.
Crossed a lot of Mega-Goldwins heading to Ireland ::)
(this Polish guy has a tail and a side-car !!! )
;D
Title: Re: Project Realistic Rig
Post by: speedfr on September 09, 2018, 01:12:30 PM
Post by: speedfr on September 09, 2018, 01:12:30 PM
Hello,
update in the W.I.P.
still working on my rig and haven't restarted GP Bikes so still no feeling off the Beta 14.
Here is the reduction box (torque increase from the DC 24V motor). One more part to print, a big one, completly circular so i can put a wheel instead of the handlebar in order to have a steering wheel for Assetto or IRacing kind of game.
This part is going to take 20hours of printing at 90% filling.
The final reduction will be 1:58. Can be updated if needed to 1:104, i'll see.
Now, i'm waiting for the 32U4 to be finished with the DC motor driver and the encoder to catch the side the handlebar/wheel goes.
Hope to come back soon with the rig ready to launch.
Cheers.
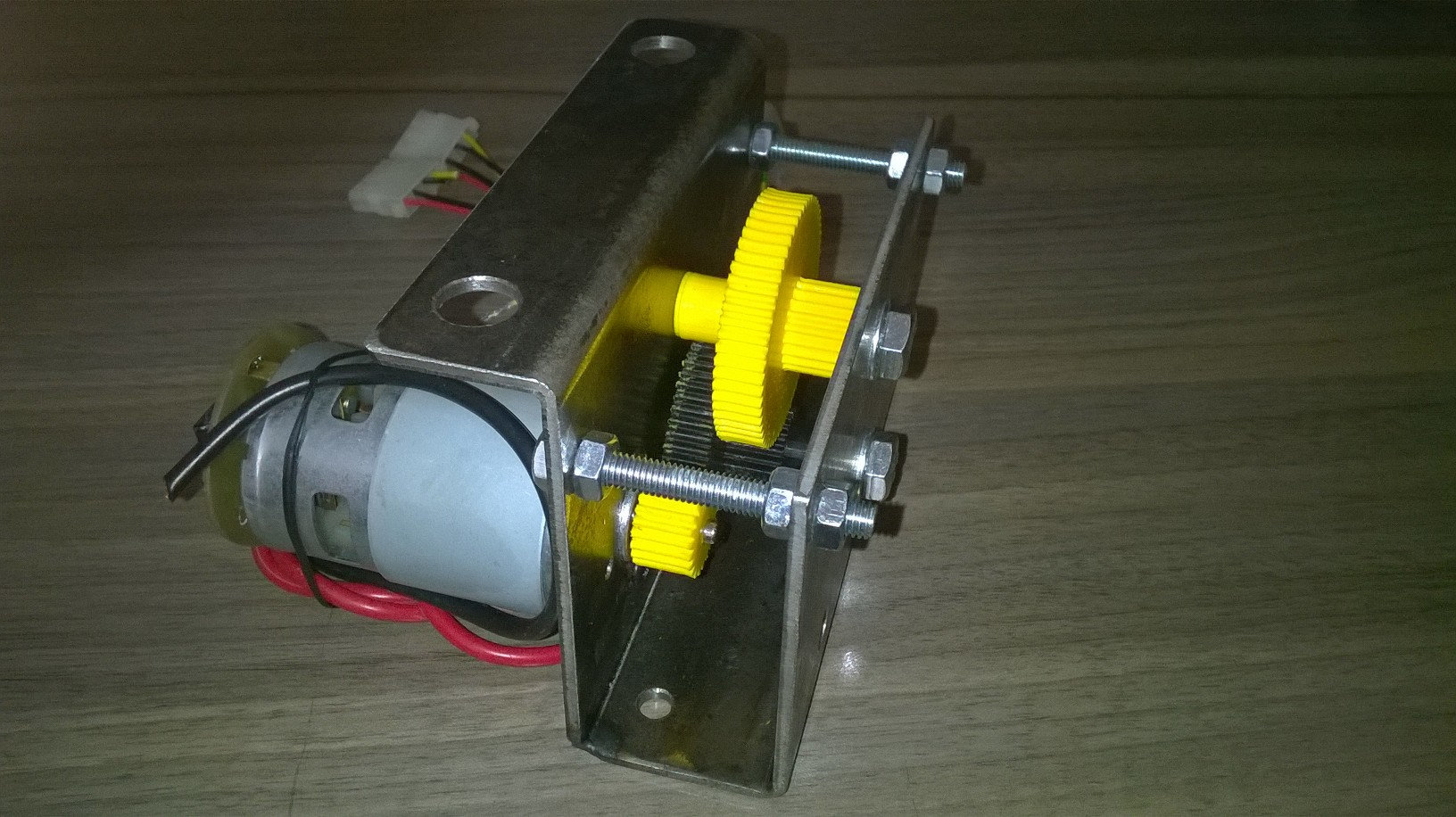
update in the W.I.P.
still working on my rig and haven't restarted GP Bikes so still no feeling off the Beta 14.
Here is the reduction box (torque increase from the DC 24V motor). One more part to print, a big one, completly circular so i can put a wheel instead of the handlebar in order to have a steering wheel for Assetto or IRacing kind of game.
This part is going to take 20hours of printing at 90% filling.
The final reduction will be 1:58. Can be updated if needed to 1:104, i'll see.
Now, i'm waiting for the 32U4 to be finished with the DC motor driver and the encoder to catch the side the handlebar/wheel goes.
Hope to come back soon with the rig ready to launch.
Cheers.
Title: Re: Project Realistic Rig
Post by: Hawk on September 09, 2018, 01:59:24 PM
Post by: Hawk on September 09, 2018, 01:59:24 PM
Nice job Speedfr! ;) 8)
Title: Re: Project Realistic Rig
Post by: speedfr on September 09, 2018, 02:08:58 PM
Post by: speedfr on September 09, 2018, 02:08:58 PM
Thank you Hawk ;)
And i realized that i forgot to mention that with the 32U4 device comes a software to FILTER all FFB aspects... So wooble and kerbs effects as well.
I'm sure some of you will loves to have that with GP bikes. At least, to me it's important.
More on the next episode ;D
And i realized that i forgot to mention that with the 32U4 device comes a software to FILTER all FFB aspects... So wooble and kerbs effects as well.
I'm sure some of you will loves to have that with GP bikes. At least, to me it's important.
More on the next episode ;D
Title: Re: Project Realistic Rig
Post by: speedfr on September 24, 2018, 01:09:35 PM
Post by: speedfr on September 24, 2018, 01:09:35 PM
Hello guys,
just a little side post waiting since i'm waiting to receive some ABS/Kevlar spool to do the big piece left i have to do. And i want to have a really sturdy one.
So in the meantime, i want to manage a special RAM for my GPS.
The one they sell with it is the shortest ( :o) and is not really adapt to my handlebar on the Pan-European when the Bagster is full on my gaz-tank (which is a false gaz tank actually). So now it looks like its good and it's not even destroying the wind-shield when turning right :P. Perfect on dimension, now i need to know how it's going to react to vibrations and the weight of the GPS on it.
So i went to steal an existing RAM draws from Thingiverse : Variable length arm RAM from Unstuck (https://www.thingiverse.com/thing:267879)
I redraw the piece from this file and twist it to what i needed.
Print was made at 80% on ABS, 0.2mm layers. (6 hours of printing for the two main parts)
If guys need i have the stl file or i can adapt the draw to a special dimension if necessary.
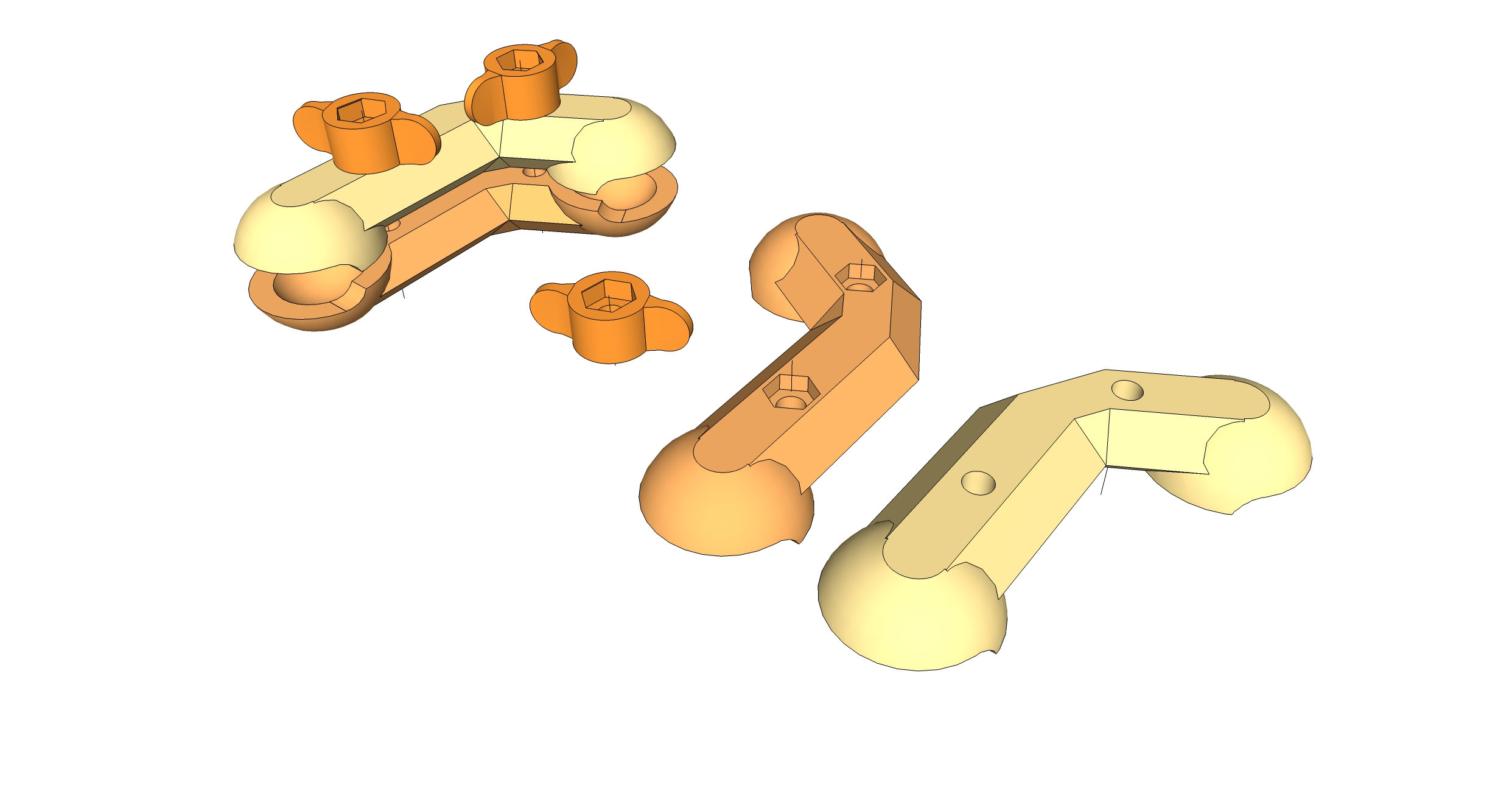


just a little side post waiting since i'm waiting to receive some ABS/Kevlar spool to do the big piece left i have to do. And i want to have a really sturdy one.
So in the meantime, i want to manage a special RAM for my GPS.
The one they sell with it is the shortest ( :o) and is not really adapt to my handlebar on the Pan-European when the Bagster is full on my gaz-tank (which is a false gaz tank actually). So now it looks like its good and it's not even destroying the wind-shield when turning right :P. Perfect on dimension, now i need to know how it's going to react to vibrations and the weight of the GPS on it.
So i went to steal an existing RAM draws from Thingiverse : Variable length arm RAM from Unstuck (https://www.thingiverse.com/thing:267879)
I redraw the piece from this file and twist it to what i needed.
Print was made at 80% on ABS, 0.2mm layers. (6 hours of printing for the two main parts)
If guys need i have the stl file or i can adapt the draw to a special dimension if necessary.
Title: Re: Project Realistic Rig
Post by: uberslug on October 01, 2018, 09:24:18 AM
Post by: uberslug on October 01, 2018, 09:24:18 AM
The interesting bit is at 35 seconds...
https://youtu.be/hmYHRNzunQI
https://youtu.be/hmYHRNzunQI
Title: Re: Project Realistic Rig
Post by: matty0l215 on October 01, 2018, 09:33:39 AM
Post by: matty0l215 on October 01, 2018, 09:33:39 AM
Quote from: uberslug on October 01, 2018, 09:24:18 AM
The interesting bit is at 35 seconds...
https://youtube.com/v/hmYHRNzunQI
Throwing a Boomerang in GPB would be a great idea ;)
Title: Re: Project Realistic Rig
Post by: speedfr on October 01, 2018, 11:32:07 AM
Post by: speedfr on October 01, 2018, 11:32:07 AM
??? ??? ??? ??? :P :o :o
I have to admit, i didn't get it.
I used to love Lego, Mecano and other construction stuff when you're young.
But here, i'm not sure what it means...
But if you want to make a rig out of Lego, i can't wait to see that ;D
I have to admit, i didn't get it.
I used to love Lego, Mecano and other construction stuff when you're young.
But here, i'm not sure what it means...
But if you want to make a rig out of Lego, i can't wait to see that ;D
Title: Re: Project Realistic Rig
Post by: speedfr on May 03, 2019, 12:06:25 PM
Post by: speedfr on May 03, 2019, 12:06:25 PM
News coming soon i hope...

Title: Re: Project Realistic Rig
Post by: poupou59890 on May 03, 2019, 12:10:48 PM
Post by: poupou59890 on May 03, 2019, 12:10:48 PM
yeah :) Can't wait to see !
Title: Re: Project Realistic Rig
Post by: speedfr on May 03, 2019, 01:19:29 PM
Post by: speedfr on May 03, 2019, 01:19:29 PM
Thanks Poupou,
i still have to find out hwo to link my handlebar to that and the Sapetoku is restarting !!! :P
i still have to find out hwo to link my handlebar to that and the Sapetoku is restarting !!! :P
Title: Re: Project Realistic Rig
Post by: poupou59890 on May 03, 2019, 03:06:08 PM
Post by: poupou59890 on May 03, 2019, 03:06:08 PM
Hi,
The best way is t make a CNC part or at least use a 3D printer as almost the same thing than a quickrelease T300rs. then you can use real handlebar mount, I am not sure that I am clear^^
The best way is t make a CNC part or at least use a 3D printer as almost the same thing than a quickrelease T300rs. then you can use real handlebar mount, I am not sure that I am clear^^
Title: Re: Project Realistic Rig
Post by: speedfr on May 03, 2019, 03:20:31 PM
Post by: speedfr on May 03, 2019, 03:20:31 PM
Te tracasses pas, le moteur est chez un tourneur/fraiseur pour faire la pièce de relation entre guidon et moteur. Meme en ABS (j'ai une imprimante 2D) je n'aurais pas confiance, là ce sera en acier.
Title: Re: Project Realistic Rig
Post by: poupou59890 on May 03, 2019, 03:36:29 PM
Post by: poupou59890 on May 03, 2019, 03:36:29 PM
oui c'est beaucoup plus simple et sain car la avec le FFB il y a aura des efforts, en plus au tour c'est super simple a faire , ensuite un coup d'usinage pour la rainure de clavette et c'est fait.
Title: Re: Project Realistic Rig
Post by: Chris_Beeves on May 03, 2019, 03:46:18 PM
Post by: Chris_Beeves on May 03, 2019, 03:46:18 PM
Quote from: speedfr on May 03, 2019, 12:06:25 PMNews coming soon i hope...
Uuuuhh! Niiice!
What are you using to drive it?
What motor is it? :D
Title: Re: Project Realistic Rig
Post by: speedfr on May 03, 2019, 10:06:14 PM
Post by: speedfr on May 03, 2019, 10:06:14 PM
@Chris_Beeves :
The motor is the Mige ST with 20 N.M of torque. Tne encoder as 4 millions value for a complete revolution (360°). It's super accurate.
And it "understand" the FFB to reproduce it. The only one that i'm gonna work on and activate is on the steering all the rest i don't care : bumps, false FFB that comes from the gear changing, stuff like that.
The box is a SimuCube V1 and inside there's is a ioni card and a big fat power supply in 48V, 600W.
The thing is, you can set the angle value so i'll try with 2X30° so 60° and i'll see.
But for now, the motor is at a guys who is making the piece i need to link my H.S-Like handlebar to the motor axle.
So, maybe i have the stuff ready in front of me next week-end.
The rest of the axis and all the buttons will still be on the Leo Bodnard board.
I'll come back here as soon as i restart and sure, i'll put a video in addition.
That will be The Sapetoku V2.0 :)
The motor is the Mige ST with 20 N.M of torque. Tne encoder as 4 millions value for a complete revolution (360°). It's super accurate.
And it "understand" the FFB to reproduce it. The only one that i'm gonna work on and activate is on the steering all the rest i don't care : bumps, false FFB that comes from the gear changing, stuff like that.
The box is a SimuCube V1 and inside there's is a ioni card and a big fat power supply in 48V, 600W.
The thing is, you can set the angle value so i'll try with 2X30° so 60° and i'll see.
But for now, the motor is at a guys who is making the piece i need to link my H.S-Like handlebar to the motor axle.
So, maybe i have the stuff ready in front of me next week-end.
The rest of the axis and all the buttons will still be on the Leo Bodnard board.
I'll come back here as soon as i restart and sure, i'll put a video in addition.
That will be The Sapetoku V2.0 :)
Title: Re: Project Realistic Rig
Post by: Chris_Beeves on May 03, 2019, 10:25:04 PM
Post by: Chris_Beeves on May 03, 2019, 10:25:04 PM
Hahaa, Sapetoku.. Your rig will have more torque than Gaston's whole engine did!
That is a beast!! 20Nm.. I wouldn't want to be wrestling that thing on a go kart track! ;) It can pull your arms straight off!
Can you pick what ffb to use? Is that in game or in hardware?
Really excited to see the outcome of this!!
That is a beast!! 20Nm.. I wouldn't want to be wrestling that thing on a go kart track! ;) It can pull your arms straight off!
Can you pick what ffb to use? Is that in game or in hardware?
Really excited to see the outcome of this!!
Title: Re: Project Realistic Rig
Post by: speedfr on May 04, 2019, 03:23:05 PM
Post by: speedfr on May 04, 2019, 03:23:05 PM
Chris, you can set the strength and filter the FFB to catch the one you like and ignore all the rest.
It's from the software that comes with, you set everything up and store it, than you don't need it anymore.
In all the screens there, everything is "grey" because the Dc Motor and the Simucube are not present at my desk right now. Next week, i'll start to tweak all of that and have this pages on a "normal" view.
So screen 1 is the basic setup of the rotation angle and the FFB effect. With tons of others things.
Screen 2 is the endstop settings and the sring effect in centering back to know the strength you like (better on car games). Look like its where you setup the 128 buttons and the 7 analogiques axis.
Screen 3 is this analogique biding and the buttons.
So, once i "master" the FFB and everyting related to the sterring, i'll move the baseboard (Leo Bodnar) to this Simucube system that can hold more than we need (i need 4 more axis + the Ed-tracker for myself and 12 buttons is fine including the Gear+ and Gear -).
The Leo Bodnar is going to be attributed to another project concerning Star Citizen (slider/buttons box in for my HOTAS).
I haven't played since v13 so now it's v15b, i changed from W7 to W10, i hope it's still gonna work as well. Can't wait. (took so long to put money aside for that Dc Motor+Simucube...)
And most of the most, i hope the Moto2 Sapetoku made by Julien113 can still be applied to the last version of Moto2. That worries me.
Sorry the screen are in French...
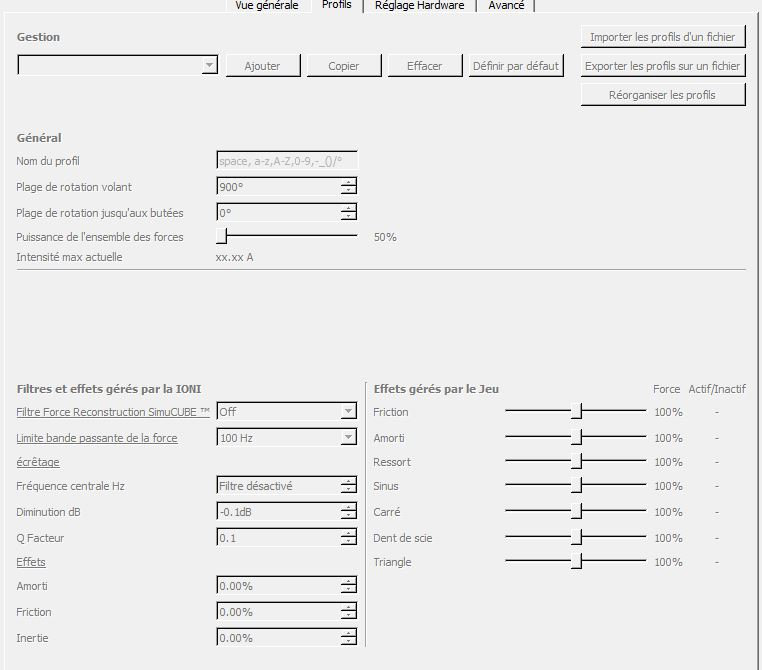
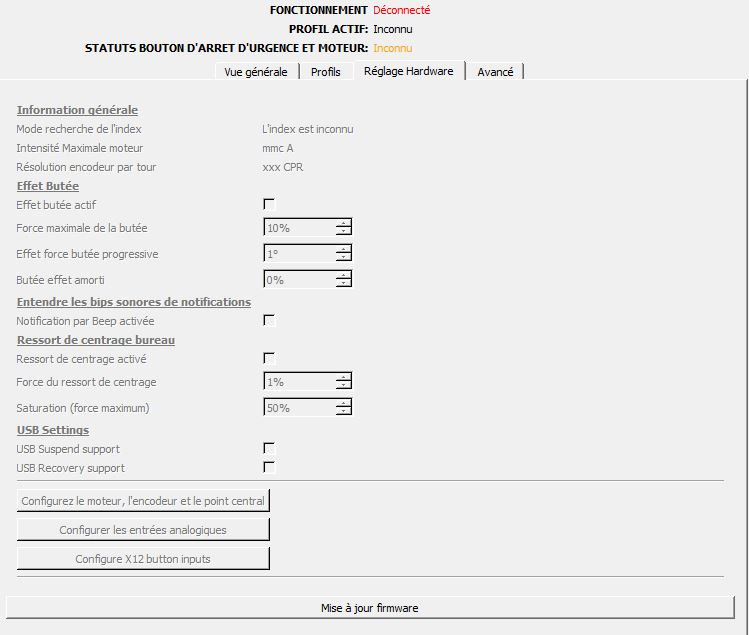

It's from the software that comes with, you set everything up and store it, than you don't need it anymore.
In all the screens there, everything is "grey" because the Dc Motor and the Simucube are not present at my desk right now. Next week, i'll start to tweak all of that and have this pages on a "normal" view.
So screen 1 is the basic setup of the rotation angle and the FFB effect. With tons of others things.
Screen 2 is the endstop settings and the sring effect in centering back to know the strength you like (better on car games). Look like its where you setup the 128 buttons and the 7 analogiques axis.
Screen 3 is this analogique biding and the buttons.
So, once i "master" the FFB and everyting related to the sterring, i'll move the baseboard (Leo Bodnar) to this Simucube system that can hold more than we need (i need 4 more axis + the Ed-tracker for myself and 12 buttons is fine including the Gear+ and Gear -).
The Leo Bodnar is going to be attributed to another project concerning Star Citizen (slider/buttons box in for my HOTAS).
I haven't played since v13 so now it's v15b, i changed from W7 to W10, i hope it's still gonna work as well. Can't wait. (took so long to put money aside for that Dc Motor+Simucube...)
And most of the most, i hope the Moto2 Sapetoku made by Julien113 can still be applied to the last version of Moto2. That worries me.
Sorry the screen are in French...
Title: Re: Project Realistic Rig
Post by: HornetMaX on May 04, 2019, 07:37:26 PM
Post by: HornetMaX on May 04, 2019, 07:37:26 PM
Quote from: speedfr on May 03, 2019, 10:06:14 PM@Chris_Beeves :That's interesting. Hw much did it cost you ?
The motor is the Mige ST with 20 N.M of torque. Tne encoder as 4 millions value for a complete revolution (360°). It's super accurate.
And it "understand" the FFB to reproduce it. The only one that i'm gonna work on and activate is on the steering all the rest i don't care : bumps, false FFB that comes from the gear changing, stuff like that.
The box is a SimuCube V1 and inside there's is a ioni card and a big fat power supply in 48V, 600W.
Title: Re: Project Realistic Rig
Post by: Myst1cPrun3 on May 04, 2019, 08:41:29 PM
Post by: Myst1cPrun3 on May 04, 2019, 08:41:29 PM
https://www.simracingbay.com/product/simucube-based-osw-kit-with-cm110-case/
I guess you could find a cheaper one somewhere used or somewhere else, but on the official website a new one will set you back anywhere between £800-£1200 depending on the motor and other little options.
I've been looking at the Fanatec DD wheels, as they're not only compatible with everything that's played atm, (Both Game and console wise, PS4 and XBOX), but they have the inbuilt quick release system, as well as a load of other rims. Only issue is there is no adaptor for custom rims as of yet, which is why I'm holding off, as it would limit the possibilities for a HandleBar setup, although as seen with the 'mixed reality vid' its still possible.
https://www.fanatec.com/eu-en/racing-wheels/podium-racing-wheel-f1-officially-licensed-for-ps4.html
or just the base:
https://www.fanatec.com/eu-en/wheel-bases/podium-wheel-base-dd1-eu-1.html
More powerful base:
https://www.fanatec.com/eu-en/wheel-bases/podium-wheel-base-dd2-eu.html
I guess you could find a cheaper one somewhere used or somewhere else, but on the official website a new one will set you back anywhere between £800-£1200 depending on the motor and other little options.
I've been looking at the Fanatec DD wheels, as they're not only compatible with everything that's played atm, (Both Game and console wise, PS4 and XBOX), but they have the inbuilt quick release system, as well as a load of other rims. Only issue is there is no adaptor for custom rims as of yet, which is why I'm holding off, as it would limit the possibilities for a HandleBar setup, although as seen with the 'mixed reality vid' its still possible.
https://www.fanatec.com/eu-en/racing-wheels/podium-racing-wheel-f1-officially-licensed-for-ps4.html
or just the base:
https://www.fanatec.com/eu-en/wheel-bases/podium-wheel-base-dd1-eu-1.html
More powerful base:
https://www.fanatec.com/eu-en/wheel-bases/podium-wheel-base-dd2-eu.html
Title: Re: Project Realistic Rig
Post by: speedfr on May 04, 2019, 09:09:53 PM
Post by: speedfr on May 04, 2019, 09:09:53 PM
Here is the Motor i use. 359€ but mine as a 4.2millions encoder and this kind is discontinued...
https://www.simracingbay.com/product/mige-osw-kit/
Today, the simucube went to simucube 2 with just external power supply and everything is inside the motor, a new one and it's quite expensive.
I catched the Simucube earlier this year for a good deal but the Motor i have was not the cheapest because they stooped this model but the encoder is a lot better accuracy and it came with a nice aluminium stand. Plus the guy did the entire config and the latest firmware directly on my computer helping me in order not to "brick" the thing.
And this thing can be used with a wheel (DIY or Fanatec-like).
Here : https://nsh-racing.com/categorie-produit/hardware/ddrive/
https://www.simracingbay.com/product/mige-osw-kit/
Today, the simucube went to simucube 2 with just external power supply and everything is inside the motor, a new one and it's quite expensive.
I catched the Simucube earlier this year for a good deal but the Motor i have was not the cheapest because they stooped this model but the encoder is a lot better accuracy and it came with a nice aluminium stand. Plus the guy did the entire config and the latest firmware directly on my computer helping me in order not to "brick" the thing.
And this thing can be used with a wheel (DIY or Fanatec-like).
Here : https://nsh-racing.com/categorie-produit/hardware/ddrive/
Title: Re: Project Realistic Rig
Post by: speedfr on May 16, 2019, 01:38:21 PM
Post by: speedfr on May 16, 2019, 01:38:21 PM
Ok, i just received the metallic piece to join the handlebar to the Dc Motor and it's going to look like this.
I stiil have to make it better, taking the old sterring system and hook all the different potienmoters to the Simucube since it can handle 6 more analog ways and 32 buttons as the Leo Bodnar does.
(Leo Bordnar who is going to be used in another project "WIP" of a dashboard for Star Citizen).
I'm gonna reinstall GP Bikes (haven't use it since v 13 and went to W10 in the miffletime so i think i'm not ready yet. But it's coming #WokeUpWithWood ;D
 (http://zupimages.net/viewer.php?id=19/20/osgn.jpg)
(http://zupimages.net/viewer.php?id=19/20/osgn.jpg)
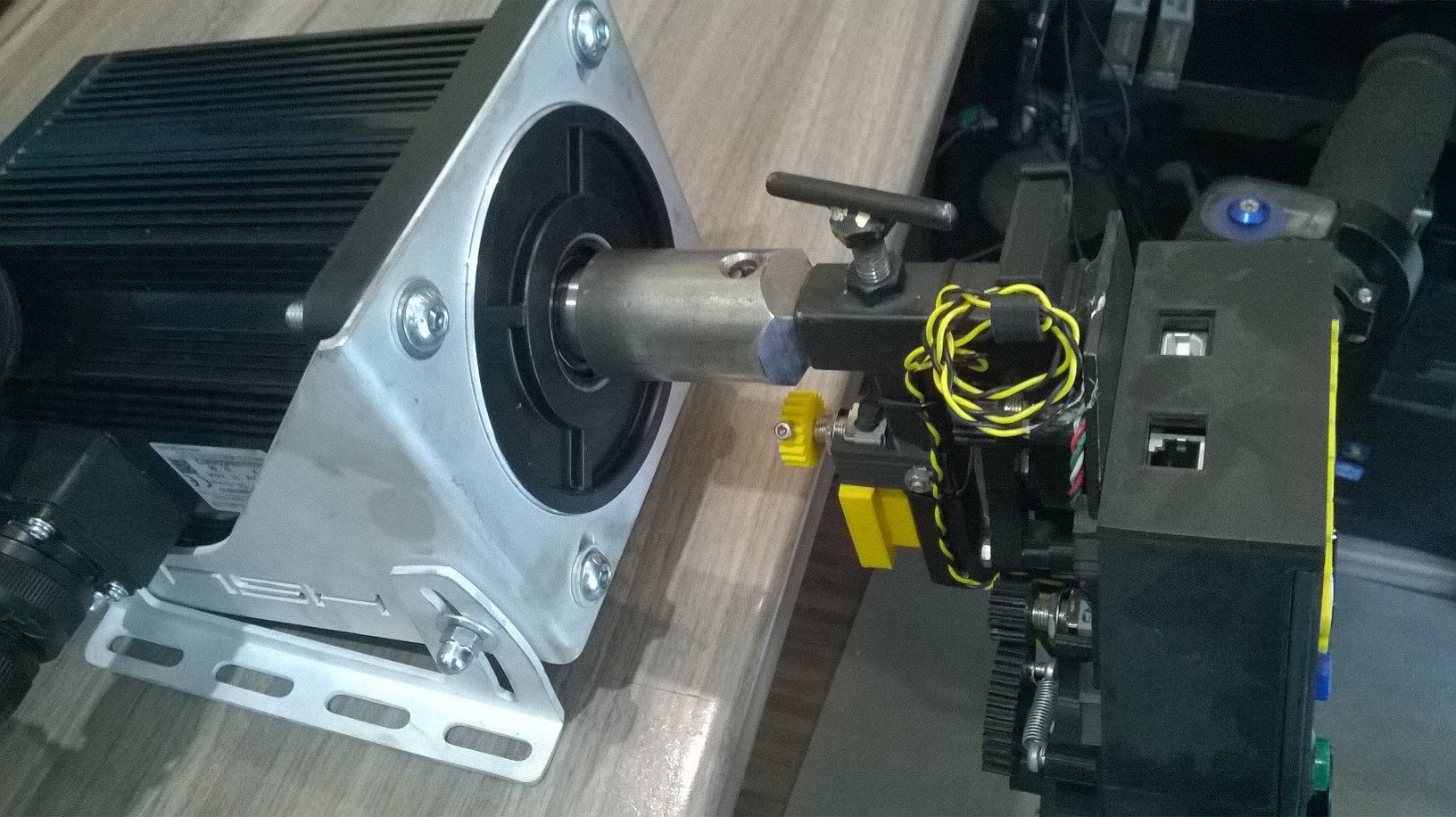 (http://zupimages.net/viewer.php?id=19/20/5i0i.jpg)
(http://zupimages.net/viewer.php?id=19/20/5i0i.jpg)
 (http://zupimages.net/viewer.php?id=19/20/8jtf.jpg)
(http://zupimages.net/viewer.php?id=19/20/8jtf.jpg)
 (http://zupimages.net/viewer.php?id=19/20/vs5c.jpg)
(http://zupimages.net/viewer.php?id=19/20/vs5c.jpg)
I stiil have to make it better, taking the old sterring system and hook all the different potienmoters to the Simucube since it can handle 6 more analog ways and 32 buttons as the Leo Bodnar does.
(Leo Bordnar who is going to be used in another project "WIP" of a dashboard for Star Citizen).
I'm gonna reinstall GP Bikes (haven't use it since v 13 and went to W10 in the miffletime so i think i'm not ready yet. But it's coming #WokeUpWithWood ;D
(http://zupimages.net/viewer.php?id=19/20/osgn.jpg) (http://zupimages.net/viewer.php?id=19/20/5i0i.jpg) (http://zupimages.net/viewer.php?id=19/20/8jtf.jpg) (http://zupimages.net/viewer.php?id=19/20/vs5c.jpg)
Title: Re: Project Realistic Rig
Post by: doubledragoncc on May 16, 2019, 06:10:24 PM
Post by: doubledragoncc on May 16, 2019, 06:10:24 PM
Just lovin watchin you get closer to ridin............Fantastic work!!!
DD
DD
Title: Re: Project Realistic Rig
Post by: speedfr on May 16, 2019, 07:24:07 PM
Post by: speedfr on May 16, 2019, 07:24:07 PM
Oh Allan, you can't imagine how much it pleases me to hear that from you my friend !
I'm completly in "Work In Progress" to obtain what was bugging me, when i was saying that it's super fine except it woobles all the way without control. I tried so bad to brake it with a piece of cork but that wasn't the solution.
And i think i'm getting close to what i want but little by little, cuz it's very expensive but i strive hard to get it.
Here for the pleasure, the picture of the metallic part that i picked today (35€).
So i can use the exact HS design, just plug it and go !
And as i said, i'm gonna remove the Leo Bodnar and go through the entire Simucube interface.
Obviously you'll be the first to get the link to the video i'm gonna do about Sapetoku v2.0 and i know you can't add that to every HSx handlebar cuz it will be more than twice the price but i really think it's gonna help a lot for the feelings. Each time i tried with a FFB wheel the steering feeling was good but not the rest. Here i might have the both at one time. At least i hope...
Here is the part that has been done to received the HS handlebar. (If some guys ask themselves, it's a DD handlebar that i "managed" to work on my own way but actually every HSx could go on that system).
 (http://zupimages.net/viewer.php?id=19/20/gayh.jpg)
(http://zupimages.net/viewer.php?id=19/20/gayh.jpg)
I'm completly in "Work In Progress" to obtain what was bugging me, when i was saying that it's super fine except it woobles all the way without control. I tried so bad to brake it with a piece of cork but that wasn't the solution.
And i think i'm getting close to what i want but little by little, cuz it's very expensive but i strive hard to get it.
Here for the pleasure, the picture of the metallic part that i picked today (35€).
So i can use the exact HS design, just plug it and go !
And as i said, i'm gonna remove the Leo Bodnar and go through the entire Simucube interface.
Obviously you'll be the first to get the link to the video i'm gonna do about Sapetoku v2.0 and i know you can't add that to every HSx handlebar cuz it will be more than twice the price but i really think it's gonna help a lot for the feelings. Each time i tried with a FFB wheel the steering feeling was good but not the rest. Here i might have the both at one time. At least i hope...
Here is the part that has been done to received the HS handlebar. (If some guys ask themselves, it's a DD handlebar that i "managed" to work on my own way but actually every HSx could go on that system).
(http://zupimages.net/viewer.php?id=19/20/gayh.jpg)
Title: Re: Project Realistic Rig
Post by: speedfr on May 25, 2019, 02:57:54 PM
Post by: speedfr on May 25, 2019, 02:57:54 PM
Hey Riders !!
things are going slow but good ;D
(have too much work lately but i'm not gonna cry...)
i'm in the process of getting rid of the Leo Bodnar board and i started to understand the SimuCube (Ioni) connections.
Here is the full draw of how it's going to be connected if somehow another dude is willing to use this board base.
28 buttons and 4 axis, the leaning axis is controlled directly by the Simucube since it has FFB inside. And so far, even if i'm not finished settings things up, it's a blast. coming soon on the track (btw, bikes from beta 13 works weird on Beta 15b) and i can't access to the Mega Bike Mods link -> https://mega.nz/#F!GdAUhKxA!04IzRVoF6CEVLUq2nbpH1g!mAQVFawA
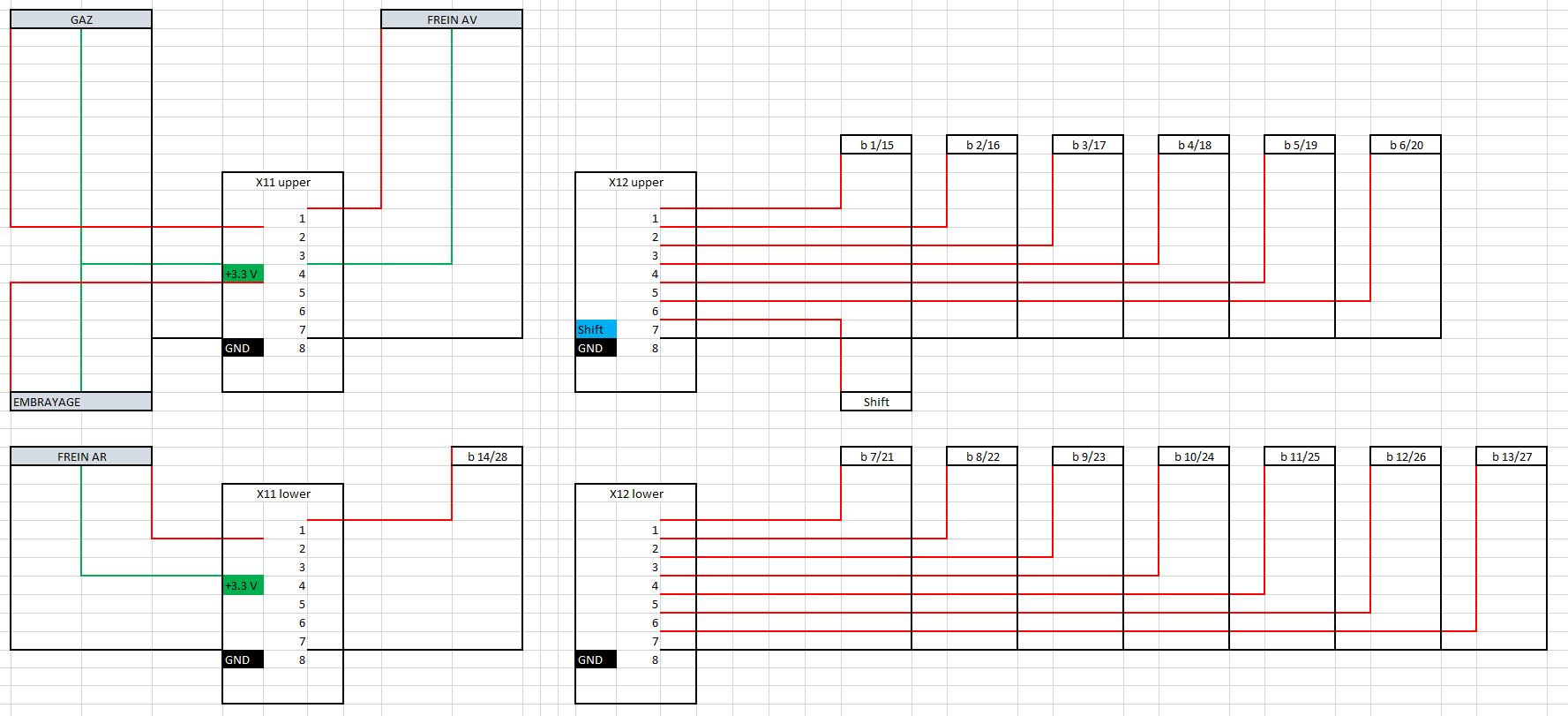 (http://zupimages.net/viewer.php?id=19/21/a1kp.jpg)
(http://zupimages.net/viewer.php?id=19/21/a1kp.jpg)
things are going slow but good ;D
(have too much work lately but i'm not gonna cry...)
i'm in the process of getting rid of the Leo Bodnar board and i started to understand the SimuCube (Ioni) connections.
Here is the full draw of how it's going to be connected if somehow another dude is willing to use this board base.
28 buttons and 4 axis, the leaning axis is controlled directly by the Simucube since it has FFB inside. And so far, even if i'm not finished settings things up, it's a blast. coming soon on the track (btw, bikes from beta 13 works weird on Beta 15b) and i can't access to the Mega Bike Mods link -> https://mega.nz/#F!GdAUhKxA!04IzRVoF6CEVLUq2nbpH1g!mAQVFawA
(http://zupimages.net/viewer.php?id=19/21/a1kp.jpg)
Title: Re: Project Realistic Rig
Post by: VSMaster on April 24, 2020, 07:50:55 AM
Post by: VSMaster on April 24, 2020, 07:50:55 AM
Is this still going on?
Title: Re: Project Realistic Rig
Post by: Furious on June 04, 2020, 11:02:27 AM
Post by: Furious on June 04, 2020, 11:02:27 AM
Hi there! I'm gonna use this topic to ask a simple, yet important question to Piboso.
Let's say I'm building a simulator intended to be used with full body tracking and direct input steering setting.
If I was to measure the pressure put on the motorcycle pegs of the simulator by the rider, could we use this data as an input to the physics model? Being complementary to the other 'main' inputs? If directsteer mode disables "virtual rider", this should not be hard to implement, am I right?
Let's say I'm building a simulator intended to be used with full body tracking and direct input steering setting.
If I was to measure the pressure put on the motorcycle pegs of the simulator by the rider, could we use this data as an input to the physics model? Being complementary to the other 'main' inputs? If directsteer mode disables "virtual rider", this should not be hard to implement, am I right?
Title: Re: Project Realistic Rig
Post by: Chris_Beeves on June 05, 2020, 05:04:09 AM
Post by: Chris_Beeves on June 05, 2020, 05:04:09 AM
Quote from: Furious on June 04, 2020, 11:02:27 AMHi there! I'm gonna use this topic to ask a simple, yet important question to Piboso.
Let's say I'm building a simulator intended to be used with full body tracking and direct input steering setting.
If I was to measure the pressure put on the motorcycle pegs of the simulator by the rider, could we use this data as an input to the physics model? Being complementary to the other 'main' inputs? If directsteer mode disables "virtual rider", this should not be hard to implement, am I right?
You would be using it to control the rider lean L/R? Depending on how much weight you put on the pegs ,or what would it do?
IRL it doesn't really do much.
Title: Re: Project Realistic Rig
Post by: Furious on June 05, 2020, 12:33:05 PM
Post by: Furious on June 05, 2020, 12:33:05 PM
Quote from: Chris_Beeves on June 05, 2020, 05:04:09 AMQuote from: Furious on June 04, 2020, 11:02:27 AMHi there! I'm gonna use this topic to ask a simple, yet important question to Piboso.
Let's say I'm building a simulator intended to be used with full body tracking and direct input steering setting.
If I was to measure the pressure put on the motorcycle pegs of the simulator by the rider, could we use this data as an input to the physics model? Being complementary to the other 'main' inputs? If directsteer mode disables "virtual rider", this should not be hard to implement, am I right?
You would be using it to control the rider lean L/R? Depending on how much weight you put on the pegs ,or what would it do?
IRL it doesn't really do much.
No, I wouldn't. Rider lean L/R and also F/R would be controlled by body tracking. I was asking if weight applied to the pegs is a parameter in simulation. If it is, I could provide that directly to the simulator, avoiding indirect measurement that may happen in simulation.
https://www.keyence.com/ss/products/measure-sys/measurement-selection/basic/method.jsp
I have also seen comparisons, where they present that weight movement on pegs has to little effect compared to gyroscopic forces of wheels.
Title: Re: Project Realistic Rig
Post by: maggikk22 on June 05, 2020, 05:14:31 PM
Post by: maggikk22 on June 05, 2020, 05:14:31 PM
Your simulator will probably cost 10000€ if you work with Keyence! 😂
I do not know if the weight applied to the pegs is a parameter, but it should be possible (but hard and complex) to compute the real pressure on pegs with other inputs, such as the torque on your rig, and send a single value to the simulation.
I do not know if the weight applied to the pegs is a parameter, but it should be possible (but hard and complex) to compute the real pressure on pegs with other inputs, such as the torque on your rig, and send a single value to the simulation.
Title: Re: Project Realistic Rig
Post by: Vini on June 06, 2020, 01:50:19 PM
Post by: Vini on June 06, 2020, 01:50:19 PM
Sending the peg pressure as an "additional parameter" would not make much sense, since it would no longer match the rider's positioning in-game.
Just use the pressure data is input for the manual rider lean.
The analogy of Direct Steer does not really apply because the pressure on the pegs alone is not providing enough data for the game to simulate the rider properly. The game needs to know not only the pressure on the pegs but basically the pressure at any contact point between bike and rider, which is impossible to provide "manually"/externally.
Just use the pressure data is input for the manual rider lean.
The analogy of Direct Steer does not really apply because the pressure on the pegs alone is not providing enough data for the game to simulate the rider properly. The game needs to know not only the pressure on the pegs but basically the pressure at any contact point between bike and rider, which is impossible to provide "manually"/externally.